
Elektromotoren sind für den Antrieb zahlreicher industrieller, gewerblicher und privater Anwendungen unverzichtbar. Zu den gängigsten Elektromotortypen zählen der Asynchronmotor und der Synchronmotor. Jeder Motor bietet einzigartige Eigenschaften für unterschiedliche Betriebsanforderungen. Die Kenntnis der Unterschiede hilft bei der Auswahl des optimalen Motors für eine bestimmte Anwendung und garantiert Leistung, Wirtschaftlichkeit und Effizienz.
In diesem Artikel vergleichen wir Asynchronmotoren und Synchronmotoren anhand ihrer Funktionsprinzipien, ihres Aufbaus, ihrer Effizienz, Drehzahlregelung und ihrer Anwendungen. Zusätzlich präsentieren wir eine vergleichende Analyse mit Diagrammen, um die wichtigsten Unterschiede in Leistung, Effizienz und Einsatzmöglichkeiten hervorzuheben.
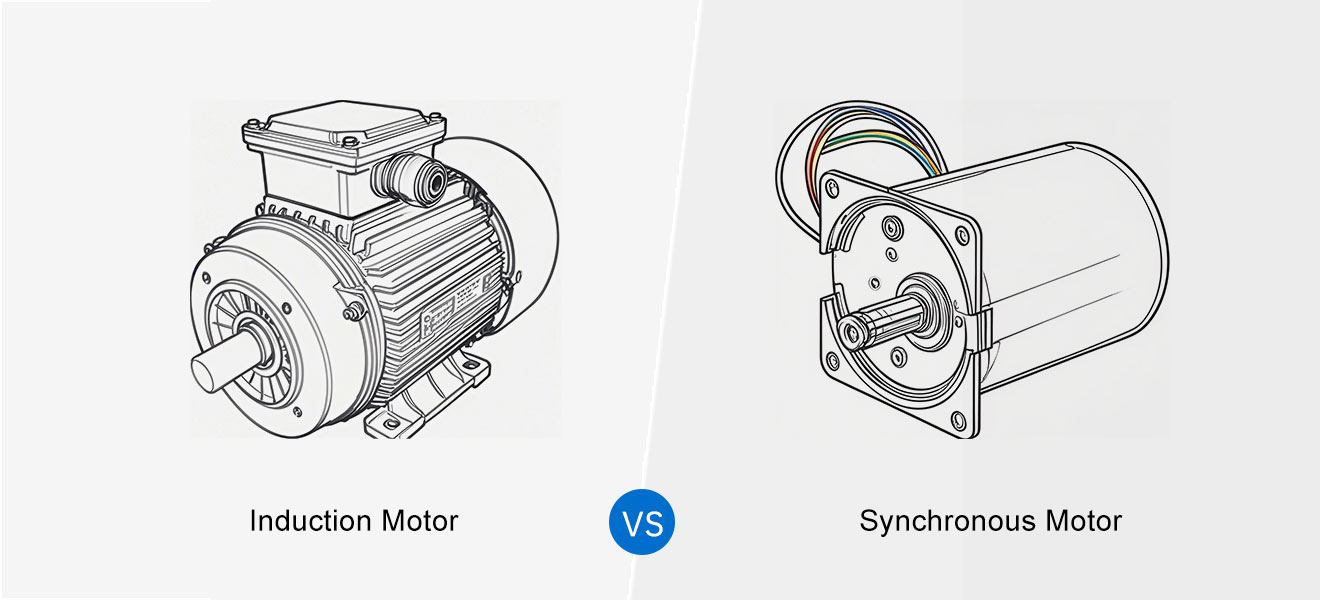
Übersicht über Asynchronmotoren und Synchronmotoren
Induktionsmotor
Ein Induktionsmotor (IM) ist ein Asynchronmotor, d. h. sein Rotor dreht sich nicht mit synchroner Drehzahl. Durch die Erzeugung eines rotierenden Magnetfelds mittels Wechselstrom in den Statorwicklungen nutzt der Induktionsmotor elektromagnetische Induktion, um Strom im Rotor zu erzeugen.
Der Rotor folgt diesem Feld, läuft jedoch aufgrund der Verzögerung zwischen Magnetfeld und Rotorbewegung stets etwas langsamer als die synchrone Drehzahl des Statorfelds.
Hauptmerkmale von Induktionsmotoren:
- Einfache Konstruktion
- Geringe Kosten
- Selbststartfähigkeit
- Schlupf zwischen Rotor- und Statorfeld
- Variable Drehzahl
Synchronmotoren
Die Synchrondrehzahl, also die konstante Drehzahl eines Synchronmotors, wird durch die Netzfrequenz und die Polzahl des Motors bestimmt. Bei einem Synchronmotor bewegen sich die rotierenden Magnetfelder von Rotor und Stator mit gleicher Drehzahl. Dies wird durch eine Gleichstromversorgung oder ein Erregersystem erreicht, das ein konstantes Magnetfeld im Rotor erzeugt und dieses mit dem Statorfeld synchronisiert.
Hauptmerkmale von Synchronmotoren:
- Arbeitet mit konstanter Drehzahl
- Erfordert ein externes Erregersystem für den Rotor
- Geeignet für Leistungsfaktoranpassung
- Komplexere Konstruktion als Asynchronmotoren
- Höhere Effizienz in bestimmten Anwendungen
Aufbau und Funktionsweise
Aufbau eines Induktionsmotors
Induktionsmotoren bestehen aus zwei Hauptteilen:
- Stator: Die Wicklungen, die das rotierende Magnetfeld erzeugen, befinden sich im stationären Teil.
- Rotor: Das rotierende Bauteil, das häufig aus Kupferstäben oder laminiertem Eisen besteht, bewegt sich parallel zum vom Stator erzeugten rotierenden Magnetfeld.
Funktionsprinzip:
- Beim Anlegen einer Wechselspannung erzeugt der Stator ein rotierendes Magnetfeld, das einen Strom im Rotor induziert.
- Die Rotation des Rotors erfolgt durch Wechselwirkungen zwischen seinem Magnetfeld und dem des Stators.
- Der Rotor hinkt dem rotierenden Feld stets hinterher, was zu Schlupf führt, einem wesentlichen Merkmal von Induktionsmotoren.
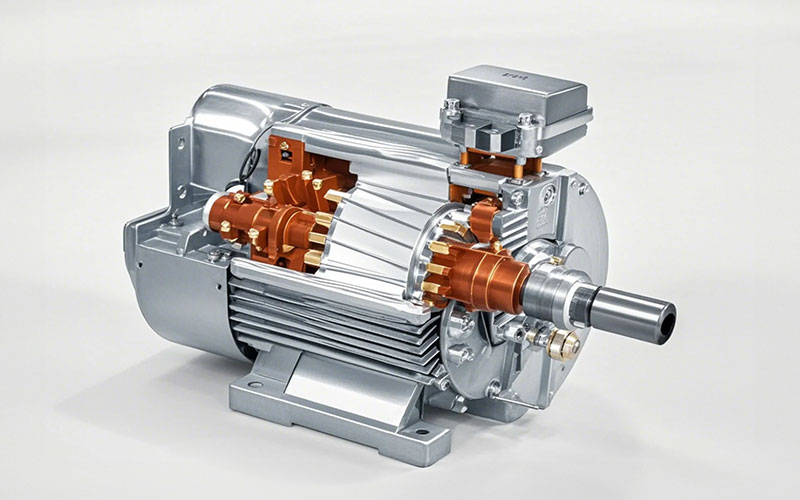
Aufbau eines Synchronmotors
Synchronmotoren sind komplexer als Induktionsmotoren, da sie ein Erregersystem zur Erzeugung des Rotormagnetfelds benötigen.
- Stator: Der Stator verfügt über Wicklungen, die wie beim Induktionsmotor ein rotierendes Magnetfeld erzeugen.
- Rotor: Der Rotor kann entweder ein Schenkelpolrotor (für langsame Anwendungen) oder ein Zylinderrotor (für schnelle Anwendungen) sein. Eine externe Quelle liefert einen separaten Gleichstrom, der den Rotor erregt.
Funktionsprinzip:
- Der Stator erzeugt ein rotierendes Magnetfeld.
- Der durch Gleichstrom erregte Rotor erzeugt sein Magnetfeld.
- Der Rotor wird durch das Magnetfeld des Stators zur Synchronisation gezwungen.
- Rotor und Stator rotieren gemeinsam mit gleicher Drehzahl (Synchrondrehzahl) ohne Schlupf.
Effizienz und Leistung
Wirkungsgrad von Asynchronmotoren
Asynchronmotoren sind grundsätzlich effizient, können aber durch den Schlupf zwischen Rotor und Statorfeld Verluste erleiden. Folgende Variablen beeinflussen den Wirkungsgrad eines Asynchronmotors:
- Schlupf: Die Abweichung zwischen Synchron- und Rotordrehzahl.
- Last: Der Wirkungsgrad nimmt mit zunehmender Last ab, insbesondere bei geringer Last.
- Leistungsfaktor: Asynchronmotoren haben einen nacheilenden Leistungsfaktor, insbesondere im Leerlauf oder bei geringer Last.
Wirkungsgrad von Synchronmotoren
Insbesondere bei Volllast oder nahe Volllast sind Synchronmotoren in der Regel effizienter als Asynchronmotoren. Synchronmotoren sind effizienter, da sie nicht rutschen. Dies ist auf folgende Gründe zurückzuführen:
- Die mit dem Rotor verbundenen Energieverluste sind geringer.
- Eine Leistungsfaktoranpassung ist möglich, wodurch der Blindleistungsbedarf des Systems gesenkt wird.
- Anwendungen, die einen hohen Wirkungsgrad und eine konstante Drehzahl erfordern, setzen häufig Synchronmotoren ein.
Leistungsvergleichstabelle
| Parameter | Asynchronmotor | Synchronmotor |
| Drehzahl | Variabel, mit Schlupf | Konstante Drehzahl, kein Schlupf |
| Wirkungsgrad | Mittel, sinkt bei Belastung | Hoch, besonders bei Volllast |
| Leistungsfaktor | Nacheilend, erfordert Kompensation | Kann Leistungsfaktor verbessern |
| Anlaufmechanismus | Selbstanlaufend | Erfordert externe Erregung |
| Komplexität | Einfach | Komplexer mit zusätzlichen Komponenten |
| Kosten | Niedriger | Höher |
Geschwindigkeitsregelung
Drehzahlregelung von Induktionsmotoren
Induktionsmotoren haben eine variable Drehzahl, die Drehzahlregelung kann jedoch komplex sein. Gängige Methoden zur Drehzahlregelung von Induktionsmotoren sind:
- V/f-Regelung: Die gängigste Methode ist die gleichzeitige Regelung von Spannung und Frequenz.
- Rotorwiderstandsregelung: Drehzahlverringerung durch Erhöhung des Rotorkreiswiderstands.
- Polumschaltung: Um die Motordrehzahl zu ändern, muss die Polzahl angepasst werden.
- Frequenzumrichter (VFD): Durch Änderung der Versorgungsfrequenz werden VFDs häufig zur Drehzahlregelung von Asynchronmotoren eingesetzt.
Drehzahlregelung für Synchronmotoren
Synchronmotoren sind für den Betrieb mit einer festgelegten Drehzahl von der Netzfrequenz abhängig. Die Drehzahlregelung ist nicht so einfach wie bei Induktionsmotoren. Die Drehzahl kann jedoch in bestimmten Anwendungen angepasst werden:
- Änderung der Versorgungsfrequenz: Zur Änderung der Synchrondrehzahl.
- Erregungssteuerung: Eine Änderung des Erregersystems des Rotors kann die Tragfähigkeit des Motors beeinflussen, hat jedoch keinen direkten Einfluss auf die Drehzahl.
Anwendungen
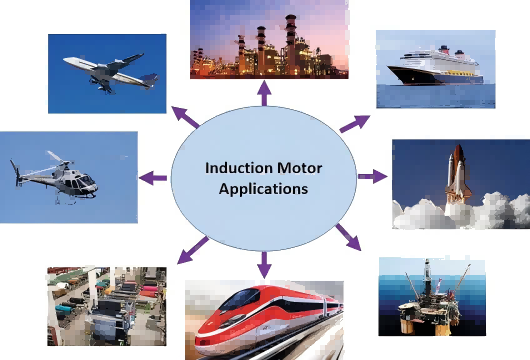
Anwendungen von Induktionsmotoren
Aufgrund ihrer Vielseitigkeit werden Induktionsmotoren häufig eingesetzt in:
- Pumpen, Lüfter und Kompressoren sind Beispiele für Industrieantriebe.
- HVAC-Systeme: Für Lüftung und Klimaanlagen
- Haushaltsgeräte: Waschmaschinen, Kühlschränke
- Landwirtschaft: Bewässerungspumpen, Futterförderer
- Transport: Elektrofahrzeuge (teilweise)
Anwendungen von Synchronmotoren
Synchronmotoren werden in Spezialanwendungen eingesetzt, bei denen konstante Drehzahl, Effizienz und Leistungsfaktorkorrektur erforderlich sind:
- Große Stromerzeugung: Synchronmotoren werden häufig in Kraftwerken eingesetzt.
- Leistungsfaktorkorrektur: Zur Erhöhung des Leistungsfaktors in Bereichen mit hohen induktiven Lasten.
- Hochleistungsantriebe: Einsatz in Branchen, in denen eine präzise Drehzahlregelung erforderlich ist, wie z. B. in Papierfabriken, der Textilindustrie und Stahlwerken.
- Synchronkondensatoren: Zur Verbesserung der Spannungsstabilität in Stromnetzen.
Kostenvergleich
Induktionsmotoren sind aufgrund ihrer einfacheren Konstruktion und ihres Selbststartmechanismus im Allgemeinen günstiger. Dank ihres geringen Wartungsbedarfs und ihrer robusten Bauweise stellen sie für eine Vielzahl von Anwendungen eine kostengünstige Option dar.
Synchronmotoren sind teurer, hauptsächlich aufgrund ihrer komplexen Konstruktion, des externen Erregersystems und zusätzlicher Komponenten. Der höhere Wirkungsgrad und die Vorteile der Leistungsfaktorkorrektur machen sie jedoch in großen oder energieintensiven Anwendungen wirtschaftlicher.
Vor- und Nachteile
Vorteile des Induktionsmotors
- Einfache Konstruktion und zuverlässiger Betrieb.
- Kostengünstig für eine Vielzahl von Anwendungen.
- Selbststartfunktion.
- Weniger Wartungsaufwand, da keine Bürsten vorhanden sind.
Nachteile von Induktionsmotoren
- Geringerer Wirkungsgrad im Vergleich zu Synchronmotoren, insbesondere bei geringer Last.
- Variable Drehzahl, die zusätzliche Ausrüstung für eine präzise Drehzahlregelung erfordert.
- Leistungsfaktorkorrekturgeräte können bei nacheilenden Leistungsfaktoren erforderlich sein.
Vorteile von Synchronmotoren
- Der Betrieb mit konstanter Drehzahl macht ihn ideal für Anwendungen, die hohe Präzision erfordern.
- Hoher Wirkungsgrad, insbesondere unter Last.
- Die Blindleistung wird durch die Leistungsfaktorkorrektur reduziert.
- Kein Schlupf, was zu geringeren Energieverlusten beiträgt.
Nachteile von Synchronmotoren
- Komplexe Konstruktion erfordert mehr Komponenten und Wartung.
- Der Rotor muss extern erregt werden.
- Anschaffungskosten höher als bei Induktionsmotoren.
- Nicht selbststartend, erfordert externe Startmechanismen.
Fazit
Induktionsmotoren zeichnen sich durch Einfachheit, Zuverlässigkeit und geringe Kosten aus und eignen sich daher für ein breites Anwendungsspektrum. Synchronmotoren hingegen bieten einen höheren Wirkungsgrad, eine konstante Drehzahl und eine Leistungsfaktorkorrektur und eignen sich daher ideal für leistungsstarke und energieintensive Anwendungen.
Ingenieure und Unternehmen können den optimalen Motortyp für ihre Anforderungen auswählen, indem sie die Unterschiede in Konstruktion, Leistung, Wirkungsgrad und Anwendung kennen. Durch die Berücksichtigung von Faktoren wie Belastung, Drehzahlregelungsanforderungen, Leistungsfaktor und Kosten können sie eine fundierte Entscheidung treffen, ob ein Induktionsmotor oder ein Synchronmotor für eine bestimmte Aufgabe die bessere Wahl ist.
