
Axialflussmotoren (AFMs) haben den Sprung von den Forschungslaboren in reale Produkte geschafft – von Robotik und Elektromobilität bis hin zu Luft- und Raumfahrt und dezentraler Energieerzeugung. Ihre scheibenförmige Geometrie ermöglicht ein hohes Drehmoment bei kurzer axialer Länge und damit die Entwicklung flacher, scheibenförmiger Maschinen, die dort eingesetzt werden können, wo herkömmliche zylindrische („Radialfluss-“) Motoren an ihre Grenzen stoßen.
Was ist ein Axialflussmotor?
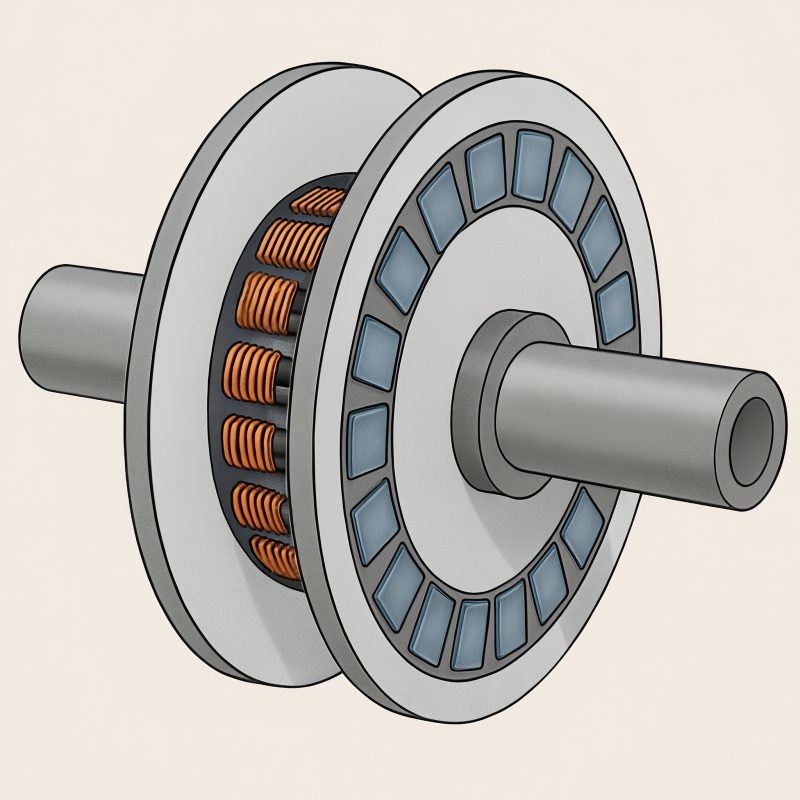
In einer Axialflussmaschine verläuft der magnetische Fluss parallel zur Welle (axial) durch einen flachen Luftspalt zwischen einer Rotorscheibe mit Permanentmagneten (oder einem gewickelten Feld) und einer flachen Statorscheibe mit Wicklungen. Im Gegensatz dazu wird der Fluss in Radialflussmaschinen radial durch einen zylindrischen Luftspalt zwischen einem inneren Rotor und einem äußeren Stator geführt. Die axiale Anordnung erzeugt einen großen effektiven Hebelarm (mittleren Radius), sodass das Drehmoment bei gegebener Scherspannung im Luftspalt annähernd mit der dritten Potenz des Radius und nur linear mit der axialen Länge skaliert. Daher bieten axiale Flussmaschinen in der Regel eine ausgezeichnete Drehmomentdichte für eine gegebene Masse und insbesondere bei begrenztem axialem Bauraum.
Gängige AFM-Topologien
- Einstator-Einrotor-Bauweise (SS-SR): Einfachste Bauweise; unausgeglichene axiale Magnetkräfte müssen strukturell ausgeglichen werden.
- Doppelrotor, Einzelstator (DR-SS): Rotoren auf beiden Seiten eines Stators gleichen die axialen Kräfte aus und verdoppeln die aktive Fläche bei gleichem Durchmesser.
- Doppelstator, Einzelrotor (DS-SR): Ein zentraler Rotor, der von zwei Statoren umgeben ist; gleicht außerdem die axialen Kräfte aus und verdoppelt das aktive Kupfer.
- Jochloser und segmentierter Anker (YASA-Typ): Segmentierte Zahnmodule ohne durchgehenden Eisenkern reduzieren die Eisenmasse und Wirbelverluste und verbessern dadurch die Drehmomentdichte.
- Kernloser (Luftkern-)Stator: Durch den Verzicht auf Eisenzähne werden Rastmomente und Eisenverluste praktisch eliminiert; ideal für Laufruhe und Teillasteffizienz, jedoch mit geringerer Flussdichte und höherer Kupfermasse.
- PCB-Stator (sehr geringe Leistung): Spiralförmige Kupferleiterbahnen auf FR-4 oder Polyimid; außergewöhnliche Dünne und Präzision für Lüfter/Mikroantriebe bei niedrigem Drehmoment.
Warum sollte man sich für ein AFM entscheiden (oder nicht)?
Stärken
- Hohe Drehmomentdichte bei moderatem Durchmesser; dünne „Pfannkuchen“-Bauform mit kurzer axialer Länge.
- Geringes Rastmoment (insbesondere bei kernlosen oder jochlosen Konstruktionen), was zu einer gleichmäßigen Bewegung und geringen Geräuschentwicklung führt.
- Skalierbarkeit im Scheibenbereich: Direktantriebsgeneratoren/-motoren mit großem Durchmesser und niedriger Drehzahl (z. B. Windkraftanlagen, Schwungräder, Prüfstände).
- Kurze Endwindungen mit konzentrierten Wicklungen (wie sie in vielen AFMs vorkommen) reduzieren die Kupferverluste.
Einschränkungen
- Eine präzisere Kontrolle des Luftspalts ist erforderlich: Die flachen Oberflächen müssen unter Last und Temperatur parallel bleiben.
- Die Wärmeableitung kann knifflig sein: Große, dünne Scheiben erfordern eine durchdachte Wärmeabfuhr, um Hotspots zu vermeiden.
- Höhere Polzahlen führen zu einer höheren elektrischen Frequenz bei gegebener Drehzahl (wirkt sich auf den Wechselrichter und die Verluste aus).
- Fertigungskomplexität bei segmentierten Statoren, Magnethalterungen und Rotorbändern – insbesondere bei hohen Drehzahlen.
Typische Leistungsbereiche (Richtwerte)
Die tatsächliche Leistung hängt von den verwendeten Materialien, der Kühlung, der Steuerung, dem Betriebszyklus und den Sicherheitsmargen ab. Die folgenden Bereiche sind konservativ, aber für eine erste Überprüfung nützlich:
- Maximale Luftspaltflussdichte (NdFeB): 0,6–0,9 T (mit Zähnen), 0,3–0,5 T (kernlos)
- Spezifische elektrische Belastung (A, Effektivwert): 20–60 kA/m (luftgekühlt), bis zu ~80 kA/m (aggressive Flüssigkeitskühlung)
- Kontinuierliche Drehmomentdichte: ~8–25 N·m/kg (gut gekühlte Ausführungen); Spitzenwerte können kurzzeitig 30–60 N·m/kg überschreiten.
- Kontinuierliche Leistungsdichte: ~1–3 kW/kg; kurzzeitige Spitzenleistung: ~2–6 kW/kg
- Maximaler Wirkungsgrad: 92–97 % (bei optimaler Optimierung)
- Luftspalt: typisch 0,3–1,5 mm (kleiner bei geringerem Durchmesser/geringerem Rundlauf)
- Polpaare: 6–40 (höher bei großen Durchmessern/niedriger Geschwindigkeit)
Dies sind keine festen Grenzen; spezielle Konstruktionen, fortschrittliche Kühlung (Sprüh-/Ölstrahl, Kühlplatten) und Premium-Magnete können diese überschreiten.
Verluste und Effizienz
- Kupferverluste (I²R): Dominierend bei hohem Drehmoment. Reduzierung durch größeren Leiterquerschnitt, niedrigere Wicklungstemperatur und höheren Füllfaktor (35–55 % sind typisch bei rundem oder rechteckigem Draht).
- Eisenverluste (Hysterese + Wirbel): Signifikant bei verzahnten Statoren; Reduzierung durch dünne Lamellen (0,1–0,35 mm), verlustarme Sorten oder weichmagnetische Verbundwerkstoffe (SMC) in 3D-Flussbereichen.
- Proximity- und Skin-Effekt: Verstärken sich mit der elektrischen Frequenz und der Geometrie des Leiters; werden durch Litzendraht (niedrige Leistung) oder geformte Stableiter (höhere Leistung) gemildert.
- Mechanische Einflüsse & Windwiderstand: Rotierende Scheiben können Windwiderstand verursachen; eine Abdeckung und glatte Oberflächen helfen.
- Die Verluste des Wechselrichters (Schalt- und Leitungsverluste) steigen mit der elektrischen Frequenz (die wiederum mit der Polzahl bei gegebener Drehzahl zunimmt). Die richtige Bauteilwahl (SiC/MOSFET/IGBT), optimale Pulsweitenmodulation (PWM) und eine geeignete Schaltfrequenz sind entscheidend.
Wärmemanagement
AFMs sind dünn und breit, daher muss die Wärme radial und axial aus Kupfer und Eisen abgeführt werden:
Leitungswege: Von Zähnen/Zahnspulen über den Gegenkörper zum Gehäuse; oder direkt von Nut/Spule zu einer flüssigkeitsgekühlten Platte.
Kühloptionen:
- Luftkonvektion über den Statorflächen, mit Kühlrippengehäusen
- Flüssigkeitskühlplatten hinter dem Stator
- Sprüh-/Ölstrahlkühlung direkt auf den Wicklungen (fortschrittlich)
Grobe Wärmestromdichten: ~5–15 kW/m² (Umluftkühlung), ~30–100 kW/m² (Flüssigkeitsplattenkühlung) und höher bei direktem Ölaufprall mit sorgfältiger Isolierung.
Werkstoffe und Fertigung
Magnete
- NdFeB (N42–N52, H/EH-Sorten): Höchste Energiedichte; maximale Temperatur beachten (80–180 °C je nach Sorte).
- SmCo: Niedrigere Remanenz, aber weitaus bessere thermische Stabilität (200–300 °C); hervorragend geeignet für Hochtemperatur- oder Demagnetisierungs-robuste Konstruktionen.
- Ferrit: Preiswert und stabil, aber geringe Energiedichte; geeignet für Flusskonzentrationsstrukturen.
Stator-Eisen
Elektrobleche (0,1–0,35 mm) für gezahnte Statoren; SMC für komplexen 3D-Fluss; oder keine für kernlose Statoren.
Wicklungen
Runddrahtspulen, rechteckige „Haarnadelspulen“ (weniger verbreitet bei AFM, aber möglich) oder Litzenspulen für Hochfrequenz-/Kleingeräte.
Leiterplattenwicklungen für Mikro-AFMs bei niedrigem Drehmoment.
Rotorintegrität
Magnete sind auf einem Stahl- oder Verbundträger befestigt; bei höheren Drehzahlen werden nichtmagnetische Bänder (z. B. Kohlefaserhülsen) verwendet, um die Umfangsspannung zu begrenzen und ein Herausspringen der Magnete zu verhindern.
Toleranzen
Ebenheit und Parallelität sind wichtig. Eine gleichmäßige Luftspaltbreite im Bereich von wenigen zehn Mikrometern verbessert die Effizienz und verringert das akustische Rauschen.
Dynamischer Ausgleich typischerweise nach ISO 21940 G2.5 (oder besser) für einen geräuscharmen Betrieb.
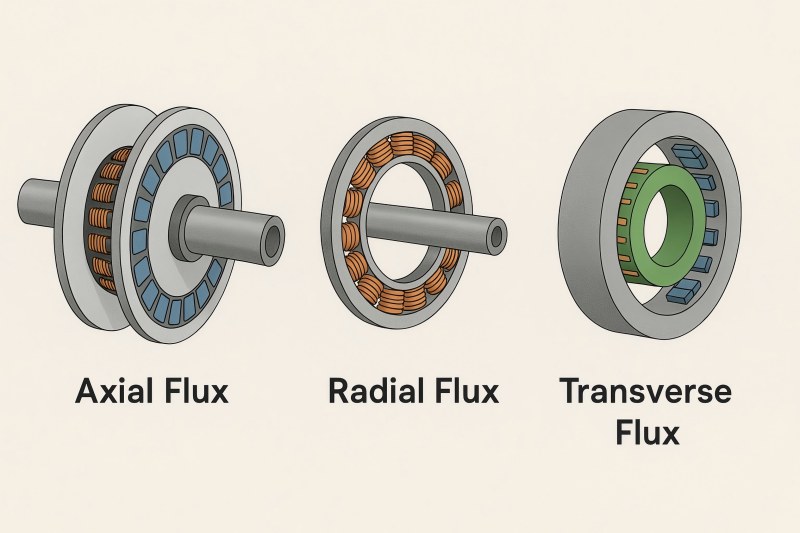
AFM vs. Radialfluss vs. Transversalfluss
Nachfolgend ein praktischer Vergleich. Die Werte sind Richtwerte – keine absoluten Werte – und setzen eine ausreichende Kühlung sowie moderne Materialien voraus.
| Attribut | Axialfluss (AFM) | Radialfluss (RFM) | Transversaler Fluss (TFM) |
| Verpackung | Dünner „Pfannkuchen“, kurze axiale Länge | Längere axiale Länge, kleinerer Durchmesser | Sperrige, komplexe Magnetwege |
| Kontinuierliche Drehmomentdichte | Hoch (8–25 N·m/kg, höher bei Flüssigkeitskühlung) | Mittel bis hoch (6–20 N·m/kg) | Potenziell sehr hoch, aber schwer zu realisieren |
| Leistungsdichte | 1–3 kW/kg (Dauerleistung), 2–6 kW/kg (Spitzenleistung) | 1–2,5 kW/kg (Dauerbetrieb), bis zu ~4 kW/kg (Spitzenleistung) | Hohes Potenzial; komplexe Fertigung |
| Anzahl der Masten (typ.) | Mittel bis hoch (6–40 Paare) | Niedrig bis mittel (3–12 Paare) | Hoch |
| Elektrische Frequenz bei gegebener Drehzahl | Höher (aufgrund der höheren Anzahl an Masten) | Untere | Höher |
| Zahnflanken- und Wellenbildung | Sehr niedrig bei kernlosen/jochlosen | Niedrig bis mittel (Maßnahmen erforderlich) | Abhängig vom Design; oft herausfordernd |
| Kühlung | Sorgfältig angelegte, ebene Wärmeleitwege erforderlich | Gut verstandene radiale Pfade | Komplex |
| Fertigungsschwierigkeiten | Mittel bis hoch (Scheiben, Streifenbildung, Präzision) | Ausgereifte Lieferketten | Hoch (3D-Flusspfade) |
| Optimale Passform | Hohes Drehmoment auf engstem axialem Raum; Direktantrieb | Universell einsetzbar; breiter Geschwindigkeitsbereich | Nischenanwendungen mit hohem Drehmoment und niedriger Drehzahl |
Schnelle Größenbestimmung durch Scherspannung
Eine schnelle Methode zur Abschätzung des AFM-Durchmessers besteht darin, eine tangentiale Scherspannung im Luftspalt und ein Verhältnis zwischen Innen- und Außenradius anzunehmen. Bei vielen AFMs liegt die kontinuierliche Scherspannung bei guter Luft- oder Flüssigkeitskühlung im Bereich von 20–40 kPa (kurzzeitig können höhere Spitzenwerte auftreten).
| Nennleistung | Drehzahl (U/min) | Drehmoment (N·m) | Vorgeschlagener ror_o (m) | Äußerer Durchmesser (m) | Elektrische Frequenz* (Hz) |
| 5 kW | 1500 | 31,83 | 0,0833 | 0,167 | 500 |
| 10 kW | 3000 | 31,83 | 0,0833 | 0,167 | 1000 |
| 25 kW | 3000 | 79,58 | 0,1131 | 0,226 | 1000 |
| 50 kW | 3000 | 159,15 | 0,1425 | 0,285 | 1000 |
| 100 kW | 3000 | 318.31 | 0,1796 | 0,360 | 1000 |
| 25 kW | 1000 | 238,73 | 0,1631 | 0,326 | 333 |
| 50 kW | 1000 | 477,46 | 0,2056 | 0,411 | 333 |
| 100 kW | 1000 | 954,93 | 0,2590 | 0,518 | 333 |
Wichtige Auslegungsparameter und praktische Anwendungsbereiche
Luftspalt
- 0,3–1,5 mm sind üblich. Größere Durchmesser und höhere Geschwindigkeiten erfordern aus Sicherheitsgründen größere Spaltmaße; Präzisionsbearbeitung und steife Strukturen ermöglichen kleinere Spaltmaße.
Magnetdicke und -muster
- 2–6 % des Außendurchmessers als grober Ausgangspunkt für mittlere Größen.
- Halbach-Anordnungen erhöhen den Luftspaltfluss und reduzieren den Bedarf an Rückdraht, erhöhen aber die Komplexität.
Schlitz-/Polkombinationen
- Bei konzentrierten Wicklungen mit Bruchnutenzahl (z. B. 12 Nuten/10 Pole, 24 Nuten/22 Pole usw.) werden der Kupferbedarf an den Windungsenden und das Rastmoment reduziert.
- Sicherstellen, dass das kleinste gemeinsame Vielfache (kgV) der Nuten und Pole symmetrische Dreiphasenwicklungen und akzeptable Raumoberwellen unterstützt.
Stromdichte (in Kupfer)
- 3–6 A/mm² RMS bei luftgekühltem Dauerbetrieb, bis zu ~10 A/mm² (oder mehr) bei erstklassiger Flüssigkeitskühlung.
- Achten Sie auf die Temperaturspitzen an den Zahnwurzeln und in der Mitte dicker Zahnschlangen.
Mechanische Integrität
- Überprüfen Sie die Umfangsspannung des Rotors bei maximaler Drehzahl (typischer Test bei 120–150 % der Nenndrehzahl).
- Verwenden Sie nichtmagnetische Hülsen (Kohlefaser), um die Magnete bei hohen Drehzahlen zu halten.
NVH (Geräusche, Vibrationen, Rauheit)
- Reduzierung des Rastmoments durch Magnetschrägung, Zahnfase, Teilnut/Pol-Verhältnis und kernlose Konstruktionen.
- Statisches und dynamisches Gleichgewicht herstellen; geringe radiale/axiale Pulsationen der elektromagnetischen Kräfte anstreben.
Materialauswahl
| Komponente | Option | Vorteile | Nachteile | Anmerkungen |
| Magnete | NdFeB (N42–N52, H/EH) | Höchste Energiedichte; kompakt | Entmagnetisierung bei hohen Temperaturen; Preisschwankungen | Überprüfen Sie B HmaxB\!H_{max}BHmax, HciH_{ci}Hci; wählen Sie die Klasse für thermische Spielräume |
| SmCo | Hohe Temperaturstabilität; korrosionsbeständig | Geringerer Energieverbrauch; Kosten | Ideal für den Betrieb bei Temperaturen über 180 °C | |
| Ferrit | Günstig; stabil | Großes Volumen; geringer Fluss | Funktioniert mit Flusskonzentrationstopologien | |
| Stator | Laminierter Stahl (0,1–0,35 mm) | Ausgereift; gute Schadensbegrenzung | 2D-Laminierungsbeschränkungen | Wählen Sie verlustarme Güteklassen für hohe Frequenzen. |
| SMC | 3D-Flussfähigkeit | Geringere Durchlässigkeit; höhere Verluste bei niedrigen Frequenzen | Nützlich für segmentierte Zähne/jochlos | |
| Kernlos (eisenfrei) | Nahezu kein Rastmoment; geringer Eisenverlust | Geringere Flussdichte; mehr Kupfer | Ausgezeichnete Laufruhe/Präzision | |
| Wicklungen | Runddraht | Flexibel, einfach | Geringere Füllung als rechteckig | Gut geeignet für Prototypen und Serienfertigung. |
| Rechteckig/Stab | Höhere Füllung, besserer thermischer Kontakt | Engere Biegungen; Prozesssteuerung | Beachten Sie dies für Maschinen mit einer Leistung von über 10 kW. | |
| Lit | Reduziert Haut-/Näheverluste | Kostenintensiv; Komplexität der Dimensionierung | Geeignet für kleine Hochfrequenzmaschinen |
Überlegungen zu Steuerung und Wechselrichter
Feldorientierte Regelung (FOC) mit sinusförmiger Kommutierung ist Standard. Konzentrierte Wicklungen führen zu Raumharmonischen; gute Stromregler und Filter reduzieren das Drehmomentwelligkeit.
Die elektrische Frequenz steigt mit der Polzahl: fe=p⋅rpm/6. Eine hohe Polzahl erhöht die Kern-/Schaltverluste; SiC-MOSFET-Wechselrichter helfen bei höheren Spannungen/Frequenzen.
Die Form der Gegen-EMK (trapezförmig vs. sinusförmig) hängt von der Formgebung von Schlitz/Pol und Magnet ab; eine sinusförmige Form reduziert die Welligkeit und das akustische Rauschen.
Sensorik: Encoder oder Resolver für hohe Dynamik; sensorlose FOC möglich, aber bei niedrigen Geschwindigkeiten schwieriger.
Zwischenkreis & Filterung: Bei hohen Polzahlen ist auf eine ausreichende Zwischenkreiskapazität zu achten und die Spannungsänderungsgeschwindigkeit (dv/dt) an den Wicklungen zu berücksichtigen (Risiko von Teilentladungen bei hoher Spannung).
Anwendungs-Snapshots
- Elektromobilität (Elektromotorräder, leichte Elektrofahrzeuge, AGVs): Dünne Bauform spart Platz beim Aufbau; hohes Drehmoment bei Raddrehzahl; auf das Wärmemanagement in abgedichteten Gehäusen achten.
- Luft- und Raumfahrt/eVTOL: Hohe Drehmomentdichte und Laufruhe sind wünschenswert; die Werkstoffe müssen strenge Temperatur- und Zuverlässigkeitsanforderungen erfüllen; SmCo könnte bevorzugt werden.
- Robotik/Co-Bots: Kernlose AFMs zeichnen sich dort aus, wo ein extrem gleichmäßiges Drehmoment mit geringem Rastmoment und Rücktriebsfähigkeit wichtig sind.
- Wind- und Direktantriebsgeneratoren: Axialflussgeneratoren mit sehr großem Durchmesser bei niedriger Drehzahl; Ferrit- oder NdFeB-Elemente mit Flusskonzentration zur Kostenkontrolle.
- Industriespindeln und Prüfstände: Das dünne Profil ermöglicht ein direktes Drehmoment bei moderater Drehzahl ohne Getriebe, wodurch Spiel und Wartungsaufwand reduziert werden.
Integrationstipps (Was oft übersehen wird)
- Axialkraftausgleich: DR-SS oder DS-SR sind zur Aufhebung der magnetischen Anziehungskraft vorzuziehen; dies erleichtert die Lagerauswahl und reduziert die Anforderungen an die Gehäusesteifigkeit.
- Rundlauf und Planheit: Messen Sie im warmen Zustand. Rotoren aus Verbundwerkstoffen und Aluminiumgehäuse dehnen sich unterschiedlich aus; halten Sie den Spalt bei maximaler Temperatur und maximaler Drehzahl sicher.
- EMV & Verkabelung: Hohe Polzahlen/elektrische Frequenzen erhöhen die dv/dt-Belastung; wählen Sie eine geeignete Kabelschirmung und Wicklungsisolierungsklasse.
- Magnetbefestigung und -sicherheit: Auslegung auf Überdrehzahl- und thermische Belastungen; Vergussmasse und Hülsen müssen ein Abheben des Magneten verhindern.
- Wartungsfreundlichkeit: Segmentierte Statorzähne und modulare Rotoren reduzieren die Ausfallzeiten für den Spulen-/PM-Austausch.
- Thermische Sensoren: RTDs/NTCs sollten in der Nähe der Zahnwurzeln und in der Mitte dichter Spulen platziert werden, um Hotspots frühzeitig zu erkennen.
- Kostenrealismus: Hochwertige Magnete und enge Fertigungstoleranzen dominieren die Stückliste; frühzeitiges DFM mit Ihrem Lieferanten vermeidet Kostensteigerungen in letzter Minute.
AxialflussmotorenGewinnen Sie, wenn hohe Drehmomente bei minimaler axialer Baulänge gefordert sind und Laufruhe, Kompaktheit und Modularität entscheidend sind. Um dieses Potenzial auszuschöpfen, müssen Sie die Luftspaltkontrolle, die Wärmeleitung und die Abstimmung des Wechselrichters präzise steuern und Materialien auswählen, die Ihren Temperatur- und Kostenanforderungen entsprechen. Nutzen Sie die Scherspannungsberechnung, um den ungefähren Durchmesser zu ermitteln, wählen Sie eine Topologie (DR-SS und DS-SR sind bewährte Standardbauteile) und optimieren Sie Kühlung und Herstellbarkeit gemeinsam mit Ihrem Lieferanten. Dank solider Konstruktion bieten AFMs herausragende Drehmomentdichte und einen präzisen Betrieb in der Elektromobilität, Luft- und Raumfahrt, Robotik und Direktantriebstechnik.
