
AxialflussmotorenAFMs (auch bekannt als Pancake-Motoren) bieten gegenüber Radialflussmotoren deutliche Vorteile – darunter hohe Leistungsdichte, kompakte Bauform und effizientes Wärmemanagement. Entscheidend für ihre Leistungsfähigkeit sind die Magnetkonfigurationen, insbesondere bei Ein- und Zweirotor-Bauweisen.
Das Verständnis der Unterschiede in der magnetischen Anordnung, dem Flussverhalten, den Leistungskennzahlen und den Kompromissen ist für die Wahl der optimalen Konfiguration unerlässlich.
Grundlagen des Axialflussmotors
Axialflussmotoren erzeugen ein elektromagnetisches Drehmoment durch die Wechselwirkung zwischen Permanentmagneten (üblicherweise Seltenerdmagneten) auf einem scheibenförmigen Rotor und Wicklungen auf einem Stator, der typischerweise eine oder mehrere Rotorscheiben umschließt. Zu ihren Merkmalen gehören:
- Kompakte axiale Baulänge – was zu einer höheren Drehmomentdichte (Nm pro Liter) führt
- Kurzer magnetischer Flussweg – reduziert magnetische Verluste und ermöglicht hohe Effizienz
- Oberflächen- oder innenmontierte Magnete – beeinflusst die magnetische Flussdurchdringung und den mechanischen Schutz
Einfluss der Magnetkonfigurationen:
- Flussdichte im Luftspalt (B_g)
- Rastmoment
- Thermische Leistung
- Mechanische Komplexität
Arten von Schlüsselmagnet-Layouts:
- Oberflächenmontierte Permanentmagnete (SPM)
- Innenliegende Permanentmagnete (IPM)
- Halbach-Arrays (ein spezielles SPM-Array zur Verstärkung des einseitigen Flusses)
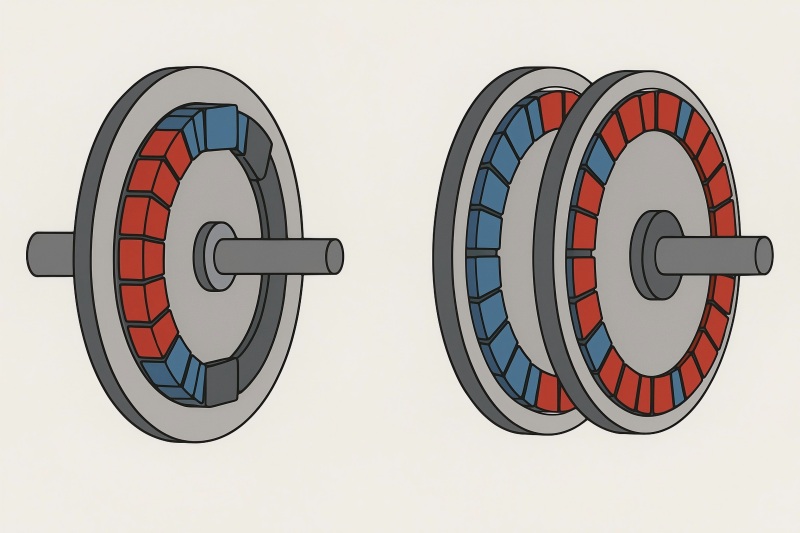
Einzelrotor-Konfiguration
In diesem Design:
- Eine Rotorscheibe trägt Magnete, die typischerweise auf einer Seite einem Stator zugewandt sind.
- Üblicherweise ist die Anordnung Rotor–Stator–[Luftspalt]–Gehäuse.
Magnetisches Verhalten
- Der magnetische Fluss durchdringt einen einzelnen Luftspalt.
- Vereinfachter Magnetkreis: eine Stator-Rotor-Schnittstelle.
- Einfache Herstellung und Montage.
Leistungsmerkmale
- Rastmoment: Vorhanden; konstruktive Maßnahmen wie Schrägstellung oder Teilnutwicklung helfen.
- Wirkungsgrad: Hoch, aber aufgrund der einseitigen Flussnutzung etwas niedriger als bei Doppelrotoren.
- Thermisches Management: Einfacher – Stator und Wicklungen zugänglich.
Anwendungsfälle
- E-Bikes, Drohnen, Haushaltsgeräte, kostengünstige Industriemotoren.
- Anwendungen, bei denen die Dicke minimal bleiben muss.
| Vorteile | Nachteile |
| – Schlichtes Design
– Leichtere Kühlung – Niedrigere Kosten |
– Geringere Drehmomentdichte
– Nur einseitiger Fluss |
Doppelrotor-Konfiguration
Zwei Rotorscheiben, die jeweils mit Magneten bestückt sind, umschließen den Stator in einer Rotor–Stator–Rotor-Anordnung (R–S–R).
Im Wesentlichen verlaufen zwei Flusspfade parallel.
Magnetisches Verhalten
- Doppelte Luftspalte: jeweils einer zwischen Rotor und Stator.
- Der Fluss teilt sich auf zwei Lücken auf; idealerweise symmetrisch, um die Ausnutzung zu maximieren.
- Die magnetische Flussdichte kann bei gleichem Magnetvolumen höher sein.
Leistungsmerkmale
- Drehmomentdichte (T_d): Im Allgemeinen höher als bei einem einzelnen Rotor, aufgrund der doppelten Interaktionsfläche.
- Drehmomentberechnung: Das ungefähre Drehmoment skaliert in etwa mit dem 2-Fachen des Drehmoments eines einzelnen Rotors (abzüglich geringfügiger Leckverluste).
- Rastmoment: Kann reduziert werden, wenn die Rotormagnetpole relativ zueinander oder zum Stator versetzt sind.
- Effizienz: Verbesserte Umwandlung von elektrischer in mechanische Energie durch bessere Flussausnutzung.
- Komplexität: Höher – erfordert die Unterstützung von zwei Rotoren; mechanische Ausrichtung von entscheidender Bedeutung.
- Wärmemanagement: Etwas komplexer aufgrund des Sandwich-Stators; die Wärme kann jedoch von beiden Seiten zu den Kühlflächen fließen.
Anwendungsfälle
- Traktionsmotoren für Kraftfahrzeuge (Elektrofahrzeuge/Hybridsysteme)
- Hochleistungs-Industrieantriebe
- Anwendungen, die ein hohes Drehmoment bei begrenztem axialem Platz erfordern
| Vorteile | Nachteile |
| – Höhere Drehmomentdichte
– Bessere Effizienz – Geringere Rastung |
– Höhere Kosten
– Komplexe Ausrichtung – Stärkere Kühlung |
Quantitativer Vergleich
Nachfolgend eine hypothetische Vergleichstabelle, basierend auf typischen kleinen bis mittelgroßen Axialflussmotoren (z. B. 10-kW-Klasse), die wichtige Kennzahlen veranschaulicht:
| Parameter | Einzelrotor (SR) | Doppelrotor (DR) |
| Anzahl der Luftspalte | 1 | 2 |
| Magnetvolumen (V_magnete) | 1 Einheit | ~1,8–2 Einheiten* |
| Maximales Drehmoment (Nm) | 50 | 90 |
| Drehmomentdichte (Nm/L) | 45 | 80 |
| Rastmoment (% von T_peak) | 5% | 3% |
| Effizienz (%) | 93 | 95 |
| Axiale Länge (mm) | 100 | 150 |
| Strukturelle Komplexität | Niedrig | Mittel-hoch |
| Thermischer Zugang | Exzellent | Mäßig |
| Geschätzter Kostenindex | 1.0 | 1.3 (aufgrund von Teilen und Montage) |
DR benötigt mehr Magnetmaterial, aber eine verbesserte magnetische Ausnutzung ermöglicht möglicherweise die Verwendung von etwas weniger Material pro Rotor als SR pro Rotor.
Anmerkungen zu den Daten:
- Magnetvolumen: Bei einer Doppelrotor-Konstruktion werden mehr Magnete verwendet, aber jeder Rotor kann etwas dünner sein, wenn sich die Flusswege besser teilen, was manchmal zu einer Steigerung um das ~1,8-fache anstatt um das volle Doppelte führt.
- Drehmomentdichte: DR liefert ein Drehmoment von etwa dem 1,8- bis 2-Fachen, was auf zwei aktive Flächen zurückzuführen ist.
- Rastmoment: Eine versetzte Magnetanordnung mindert das Drehmomentwelligkeit in DR besser.
- Effizienz: Die Gewinne ergeben sich aus einer reduzierten magnetischen Streuung und einer besseren Ausnutzung – typischerweise 1–2 Prozentpunkte.
- Axiale Länge: DR ist dicker, was sich auf den Formfaktor auswirkt.
- Kosten: Höher aufgrund von mehr Rotorteilen, doppelten Lagern und komplexerer Montage.
Designüberlegungen und Abwägungen
Magnetverwendung und Materialkosten
Seltenerdmagnete (z. B. NdFeB) dominieren den Kostenmarkt.
DR benötigt mehr Magnete, was die Kosten erhöht – die höhere Leistung könnte dies jedoch rechtfertigen.
Designer versuchen oft, die Magnetqualität (Remanenz, Koerzitivfeldstärke) und das Volumen in Einklang zu bringen.
Mechanische Komplexität
SR: Einzelwellen- und Rotorbaugruppe, einfachere Lager und Ausrichtung.
DR: erfordert zwei Rotoren, sorgfältige axiale konzentrische Ausrichtung, oft Doppellager oder ein Axiallager.
Strukturelle Unterstützung & Steifigkeit
Der zusätzliche Rotor von DR erhöht das Gewicht und die potenzielle Flexibilität.
Das Gehäuse muss robust sein, um Drehmoment- und Axialkräften standzuhalten.
Kühlungs- und Wärmepfad
SR: Stator typischerweise außenliegend, leicht zu kühlen.
DR: Der Stator befindet sich in der Mitte – ein interner Stator benötigt Wärmewege auf beiden Seiten, oft mithilfe von Kühlplatten oder Flüssigkeitskanälen.
Komplexität der Magnetkonstruktion
Flusskompensation und Leckage müssen kontrolliert werden.
Strategien zur Reduzierung des Rastmoments: Schrägstellung, Teilnuten, Magnetwinkelversatz (besonders effektiv bei DR durch gegenphasige Rotoranordnung).
Kontrollstrategie
Beide nutzen typische Regelungsmethoden (z. B. feldorientierte Regelung), aber DR kann symmetrische Induktivitätsprofile aufweisen, was eine gleichmäßigere Regelung ermöglicht.
Anwendungsbeispiele und Fallbeispiele
Elektrofahrzeuge und Traktion
Doppelrotor-AFMs sind dort besonders effektiv, wo axialer Platz vorhanden ist (z. B. zwischen Abtriebswelle und Chassis).
Beispiel: Ein 50 kW DR AFM, der in einem Elektrofahrzeug eingesetzt wird, liefert eine hohe Drehmomentdichte – Spitzenwert 300 Nm in einem 180 mm dicken Motorpaket.
Luft- und Raumfahrt sowie Drohnen
Einzelrotor-AFMs werden bevorzugt in leichten, dünnen Gehäusen (z. B. propellergetriebenen Drohnen) eingesetzt.
Beispiel: Ein 5 kW Flachmotor mit einem Durchmesser von 200 mm, einer axialen Länge von 60 mm und einem Gewicht von 2 kg – geeignet für den Antrieb von Multikoptern.
Industrielle Automatisierung
Beide Typen werden für Servomotoren oder Direktantriebsanwendungen verwendet.
DR erweist sich als vorteilhaft bei begrenztem axialem Bereich, aber hohem Drehmomentbedarf (z. B. bei Robotergelenken).
Simulierte Leistungsmodellierung
Betrachten wir zwei simulierte 20-kW-Motoren für eine Roboteranwendung:
SR-Modell:
- Durchmesser: 250 mm
- Axiale Länge: 90 mm
- Magnetvolumen: 0,005 m³ äquivalent
- Simulierte Flussdichte (B_g): 0,8 T
- Maximales Drehmoment: ~200 Nm
- Geschätzter Wirkungsgrad: 93 %
DR-Modell:
- Gleicher Durchmesser
- Axiale Länge: 140 mm
- Magnetvolumen: 0,0085 m³ äquivalent
- Simulierter B_g-Wert pro Seite: 0,75 T
- Maximales Drehmoment: ~350 Nm
- Geschätzter Wirkungsgrad: 95 %
Wichtigste Erkenntnisse:
- DR erreicht eine Drehmomentsteigerung um das ca. 1,75-Fache bei einer Vergrößerung des Magnetvolumens um das ca. 1,7-Fache.
- Der Effizienzgewinn von ca. 2 Prozentpunkten ist wahrscheinlich auf eine verbesserte Flussausnutzung und geringere Leckagen zurückzuführen.
Erweiterte Varianten
Halbach-Array-AFM
Verwendet eine Magnetanordnung, die den Fluss auf der einen Seite verstärkt und auf der Rückseite aufhebt.
Bei der DR-Konstruktion können entgegengesetzte Halbach-Anordnungen auf beiden Rotoren eingesetzt werden, um den Fluss durch den Stator weiter zu konzentrieren. Dies erhöht die Drehmomentdichte, führt aber zu einer komplexeren Fertigung.
Innenmagnet-AFM (IPM)
Bindet Magnete in das Rotormaterial ein.
Vorteile: besserer mechanischer Schutz, Potenzial für Flussschwächung.
Sowohl SR- als auch DR-IPM-Designs profitieren davon, DR-IPM ist jedoch aufgrund der Komplexität seltener.
Die Wahl zwischen Einrotor- (SR) und Doppelrotor- (DR) Konfigurationen bei Axialflussmotoren hängt von den Leistungszielen, den Platzverhältnissen, dem Kostenbudget und der Integrationskomplexität ab:
SR ist ideal, wenn Einfachheit, geringere Kosten und minimale axiale Dicke Priorität haben.
DR zeichnet sich besonders dann aus, wenn es darum geht, Drehmomentdichte und Effizienz innerhalb der zulässigen Dicke zu maximieren, insbesondere bei Hochleistungs- oder platzintensiven Anwendungen wie Elektrofahrzeugen, Industrieantrieben oder Robotern.
Konstrukteure müssen Magnetkosten, mechanische Ausrichtung, Kühlstrategien und Maßnahmen zur Reduzierung von Rastmomenten berücksichtigen. Fortschritte wie Halbach-Arrays und IPM-Varianten erweitern die Möglichkeiten zur Optimierung der AFM-Leistung. Sowohl SR als auch DR bleiben zentral für die Entwicklung von Hochleistungsmotoren der nächsten Generation.
