
Moteurs à flux axialLes moteurs à flux amorphe (AFM), également appelés moteurs plats, présentent des avantages distincts par rapport aux moteurs à flux radial : une densité de puissance élevée, une forme compacte et une gestion thermique efficace. Leurs performances reposent essentiellement sur la configuration des aimants, notamment dans les conceptions à un ou deux rotors.
Comprendre les différences en matière de configuration magnétique, de comportement du flux, de paramètres de performance et de compromis est essentiel pour choisir la configuration optimale.
Principes de base des moteurs à flux axial
Les moteurs à flux axial génèrent un couple électromagnétique grâce à l’interaction entre des aimants permanents (généralement en terres rares) situés sur un rotor en forme de disque et des enroulements sur un stator, encadrant généralement un ou plusieurs disques de rotor. Leurs caractéristiques comprennent :
- Longueur axiale compacte — ce qui se traduit par une densité de couple plus élevée (Nm par litre)
- Trajet de flux magnétique court — réduit les pertes magnétiques et permet un rendement élevé
- Aimants montés en surface ou à l’intérieur — influence la pénétration du flux et la protection mécanique
Les configurations magnétiques influencent :
- Densité de flux dans l’entrefer (B_g)
- Couple de crantage
- performances thermiques
- Complexité mécanique
Types de disposition des aimants de clés :
- Aimants permanents montés en surface (SPM)
- Aimants permanents intérieurs (IPM)
- Réseaux de Halbach (un réseau SPM spécialisé améliorant le flux unilatéral)
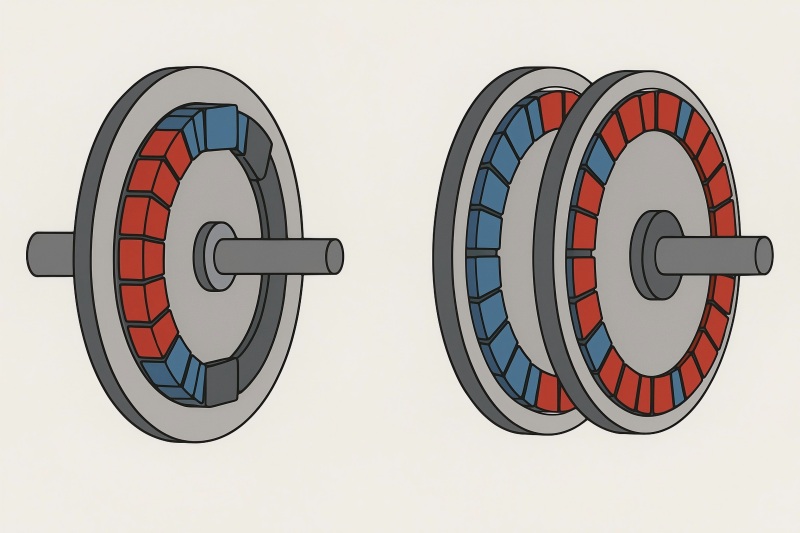
Configuration à rotor unique
Dans ce modèle :
- Un disque rotor porte des aimants, généralement face à un stator sur une face.
- Généralement agencé comme rotor–stator–[entrefer]–carter.
Comportement magnétique
- Le flux traverse un seul espace d’air.
- Circuit magnétique simplifié : une seule interface stator-rotor.
- Facilité de fabrication et d’assemblage.
Caractéristiques de performance
- Couple de crantage : présent ; des mesures d’atténuation de conception comme l’inclinaison ou l’enroulement à fentes fractionnaires peuvent aider.
- Rendement : Élevé, mais légèrement inférieur à celui d’un rotor double en raison de l’utilisation d’un flux unilatéral.
- Gestion thermique : Plus facile — stator et enroulements accessibles.
Cas d’utilisation
- Vélos électriques, drones, appareils électroménagers, moteurs industriels à bas coût.
- Applications où l’épaisseur doit rester minimale.
| Avantages | Inconvénients |
| – Design simple
– Refroidissement plus facile – Coût réduit |
– Densité de couple plus faible
– Flux unilatéral uniquement |
Configuration à double rotor
Deux disques rotor, chacun muni d’aimants, encadrent le stator dans une configuration rotor–stator–rotor (R–S–R).
En résumé, deux chemins de flux fonctionnent en parallèle.
Comportement magnétique
- Double entrefer : un entre chaque rotor et stator.
- Le flux se répartit sur deux intervalles ; idéalement symétriques pour maximiser l’utilisation.
- La densité de flux magnétique peut être plus élevée pour un même volume d’aimant.
Caractéristiques de performance
- Densité de couple (T_d) : Généralement plus élevée que celle d’un rotor unique, en raison de la surface d’interaction doublée.
- Calcul du couple : Les échelles de couple approximatives sont proches de 2× celles d’un rotor unique (moins les pertes mineures par fuite).
- Couple de crantage : Peut être réduit si les pôles magnétiques du rotor sont décalés l’un par rapport à l’autre ou par rapport au stator.
- Efficacité : Conversion électromécanique améliorée grâce à une meilleure utilisation du flux.
- Complexité : Élevée — nécessite le support de deux rotors ; l’alignement mécanique est crucial.
- Gestion thermique : légèrement plus complexe en raison du stator en sandwich ; mais la chaleur peut circuler des deux côtés vers les surfaces de refroidissement.
Cas d’utilisation
- Moteurs de traction automobile (véhicules électriques/systèmes hybrides)
- Entraînements industriels robustes
- Applications exigeant un couple élevé dans un espace axial limité
| Avantages | Inconvénients |
| – Densité de couple plus élevée
– Meilleure efficacité – Réduction du couple de crantage |
– Coût plus élevé
– Alignement complexe – Refroidissement plus intensif |
Comparaison quantitative
Vous trouverez ci-dessous un tableau comparatif hypothétique basé sur des moteurs à flux axial typiques de petite et moyenne taille (par exemple, de classe 10 kW), illustrant les principales métriques :
| Paramètre | Rotor unique (SR) | Double rotor (DR) |
| Nombre d’espaces d’air | 1 | 2 |
| Volume magnétique (V_magnets) | 1 unité | ~1,8–2 unités* |
| Couple maximal (Nm) | 50 | 90 |
| Densité de couple (Nm/L) | 45 | 80 |
| Couple de crantage (% de T_peak) | 5% | 3% |
| Efficacité (%) | 93 | 95 |
| Longueur axiale (mm) | 100 | 150 |
| Complexité structurelle | Faible | Moyen-élevé |
| Accès thermique | Excellent | Modéré |
| Indice des coûts estimés | 1.0 | 1.3 (en raison des pièces et de l’assemblage) |
DR nécessite plus de matériau magnétique, mais une meilleure utilisation du champ magnétique peut permettre d’en utiliser légèrement moins par rotor que SR.
Notes sur les données :
- Volume des aimants : Une conception à double rotor utilise plus d’aimants, mais chaque rotor peut être légèrement plus mince si les chemins de flux se partagent mieux, ce qui donne parfois une augmentation d’environ 1,8× plutôt que de 2×.
- Densité de couple : DR génère un couple d’environ 1,8 à 2 fois supérieur, reflétant deux faces actives.
- Effet de crantage : la disposition décalée des aimants atténue mieux l’ondulation du couple en régime différentiel.
- Efficacité : Les gains proviennent d’une réduction des fuites magnétiques et d’une meilleure utilisation – généralement de 1 à 2 points de pourcentage.
- Longueur axiale : le DR est plus épais, ce qui influe sur le format.
- Coût : Plus élevé en raison du nombre plus important de pièces du rotor, des doubles roulements et d’un assemblage plus complexe.
Considérations et compromis en matière de conception
Utilisation des aimants et coût des matériaux
Les aimants à base de terres rares (par exemple, NdFeB) représentent la part prépondérante du coût.
La DR utilise davantage d’aimants, ce qui augmente son coût, mais les performances supérieures peuvent le justifier.
Les concepteurs cherchent souvent à équilibrer la qualité de l’aimant (rémanence, coercivité) et le volume.
Complexité mécanique
SR : ensemble arbre et rotor unique, roulements et alignement simplifiés.
DR : nécessite deux rotors, un alignement axial concentrique précis, souvent des doubles paliers ou un palier de butée.
Support structurel et rigidité
Le rotor supplémentaire du DR ajoute du poids et un risque de flexion.
Le carter doit être robuste pour supporter le couple et les forces axiales.
Circuit de refroidissement et thermique
SR : stator généralement situé à l’extérieur, facile à refroidir.
DR : le stator est au milieu — un stator interne nécessite des voies de refroidissement des deux côtés, souvent à l’aide de plaques de refroidissement ou de canaux de fluide.
Complexité de la conception magnétique
L’annulation et la fuite du flux doivent être contrôlées.
Stratégies de réduction du couple de crantage : inclinaison, encoches fractionnaires, décalage angulaire de l’aimant (particulièrement efficace en DR par placement du rotor en opposition de phase).
Stratégie de contrôle
Les deux utilisent une commande classique (par exemple, une commande vectorielle), mais le DR peut avoir des profils d’inductance symétriques permettant une commande plus douce.
Applications et exemples de cas
Véhicules électriques et traction
Les AFM à double rotor excellent là où il existe un espace axial (par exemple, entre l’arbre de sortie et le châssis).
Exemple : Un moteur DR AFM de 50 kW utilisé dans un véhicule électrique offre une densité de couple élevée — un pic de 300 Nm dans un bloc moteur de 180 mm d’épaisseur.
Aérospatiale et drones
Les AFM à rotor unique sont privilégiés dans des configurations légères et minces (par exemple, les drones à hélice).
Exemple : Un moteur plat de 5 kW, diamètre 200 mm, longueur axiale 60 mm, poids 2 kg — adapté à la propulsion multicoptère.
Automatisation industrielle
Les deux types sont utilisés pour les servomoteurs ou les applications à entraînement direct.
La DR s’avère avantageuse dans les cas d’enveloppe axiale limitée mais de besoins de couple élevés (par exemple, les articulations robotiques).
Modélisation des performances simulées
Prenons l’exemple de deux moteurs simulés de 20 kW pour une application robotique :
Modèle SR :
- Diamètre : 250 mm
- Longueur axiale : 90 mm
- Volume de l’aimant : équivalent à 0,005 m³
- Densité de flux simulée (B_g) : 0,8 T
- Couple maximal : ~200 Nm
- Efficacité estimée : 93 %
Modèle DR :
- Même diamètre
- Longueur axiale : 140 mm
- Volume de l’aimant : équivalent à 0,0085 m³
- B_g simulé par côté : 0,75 T
- Couple maximal : ~350 Nm
- Efficacité estimée : 95 %
Principaux enseignements :
- DR permet d’obtenir une augmentation de couple d’environ 1,75× pour une augmentation de volume magnétique d’environ 1,7×.
- Gain d’efficacité d’environ 2 points probablement dû à une meilleure utilisation du flux et à une réduction des fuites.
Variantes avancées
AFM à réseau Halbach
Utilise un réseau d’aimants qui amplifie le flux d’un côté et l’annule de l’autre.
Dans la conception DR, vous pouvez utiliser des réseaux de Halbach opposés sur les deux rotors pour concentrer davantage le flux à travers le stator, augmentant ainsi la densité de couple mais ajoutant de la complexité à la fabrication.
AFM à aimant permanent interne (IPM)
Incorpore des aimants dans le matériau du rotor.
Avantages : meilleure protection mécanique, potentiel d’affaiblissement du flux.
Les deux conceptions IPM SR et DR en bénéficient, mais l’IPM DR est plus rare en raison de sa complexité.
Le choix entre les configurations à rotor unique (SR) et à double rotor (DR) dans les moteurs à flux axial dépend des objectifs de performance, des contraintes d’espace, des budgets de coûts et de la complexité d’intégration :
La SR est idéale lorsque la simplicité, le coût réduit et l’épaisseur axiale minimale sont des priorités.
DR se distingue par sa capacité à maximiser la densité de couple et l’efficacité dans les limites d’épaisseur autorisées, notamment dans les applications hautes performances ou à espace important comme les véhicules électriques, les entraînements industriels ou la robotique.
Les concepteurs doivent prendre en compte le coût des aimants, l’alignement mécanique, les stratégies de refroidissement et la réduction des effets de crantage. Grâce à des avancées telles que les réseaux de Halbach et les variantes IPM, les possibilités d’optimisation des performances des AFM se multiplient. La rugosité de surface (SR) et la rugosité dynamique (DR) demeurent essentielles à la conception des moteurs haute densité de nouvelle génération.
