


-
Marché de l'électroménager
Engagé à fournir des solutions innovantes pour l'industrie mondiale de l'électroménager
- Marque leader sur le marché mondial des moteurs de balayage de climatisation
- Un leader mondial des systèmes de drainage pour machines à laver
- Fournisseur mondial de solutions de systèmes d'eau pour réfrigérateurs
Marché de l'électroménager
Engagé à fournir des solutions innovantes pour l'industrie mondiale de l'électroménager
- Cas clients




- Classification spécifique
 Climatiseur
Climatiseur Réfrigérateur
Réfrigérateur Machine à laver
Machine à laver Cuisine et salle de bain
Cuisine et salle de bain Petits appareils électroménagers
Petits appareils électroménagers
-
Pièces détachées automobiles
Fournir des composants moteurs et mécatroniques pour automobiles
- Avantages des moteurs pas à pas pour HUD
- Capacité de production de pompes à eau automobiles à grande échelle
- Capacités des solutions de systèmes de climatisation automobile
Pièces détachées automobiles
Fournir des composants moteurs et mécatroniques pour automobiles
- Cas clients




- Classification spécifique
- Système de climatisation
 Gestion thermique
Gestion thermique Conduite intelligente
Conduite intelligente Système d'admission et d'échappement
Système d'admission et d'échappement Contrôle du corps
Contrôle du corps Système de freinage
Système de freinage
-
Contrôle industriel
Fournir des produits de moteurs et de composants rentables dans le domaine industriel
- Fournisseurs de marques de premier plan sur le marché du contrôle des vannes
- Fournisseur d'entreprise de surveillance de sécurité intérieure
- Plusieurs séries de produits répondent à différents scénarios d'application
Contrôle industriel
Fournir des produits de moteurs et de composants rentables dans le domaine industriel
- Cas clients




- Classification spécifique
 Contrôle des soupapes
Contrôle des soupapes Finances OA
Finances OA Outils de jardinage
Outils de jardinage Équipement industriel
Équipement industriel Surveillance de la sécurité
Surveillance de la sécurité Robot
Robot
-
Santé Sportive
Fournir des moteurs de haute qualité pour les industries des équipements sportifs et des équipements médicaux
- Fournisseur de moteurs d'entraînement principaux pour équipements sportifs haut de gamme
- Fournisseurs de marques de premier plan dans le secteur des dispositifs médicaux
- Capacité à fournir des solutions telles que des meubles intelligents
Santé Sportive
Fournir des moteurs de haute qualité pour les industries des équipements sportifs et des équipements médicaux
- Cas clients




- Classification spécifique
 Équipements sportifs
Équipements sportifs Instruments médicaux
Instruments médicaux Divertissement de jeu
Divertissement de jeu Maison intelligente
Maison intelligente





Le 8 janvier 2026, la base de production à l’étranger de Leili – Leili Malaysia Co., Ltd. – a été inaugurée en grande pompe au parc industriel de Selangor, en Malaisie. M. Su Da, directeur général de Jiangsu Leili, accompagné de son équipe dirigeante, a assisté à cet événement historique en compagnie de représentants locaux, de partenaires et d’invités de marque. Cette base de production intelligente de Leili Motors en Malaisie constitue une étape cruciale de la stratégie de mondialisation de Leili. Elle a pour mission de produire des millions de moteurs haut de gamme par an et témoigne de la volonté de Leili de s’implanter durablement sur le marché de l’Asie du Sud-Est.

Dans son discours, le directeur général Su Da a déclaré : « Nous avons choisi la Malaisie comme base à l’étranger pour Leili en raison du dynamisme de ce pays. Il bénéficie d’un riche mélange culturel, d’un écosystème industriel florissant et d’atouts géographiques uniques. Située au cœur de l’Asie du Sud-Est, elle offre un environnement commercial ouvert et inclusif, un soutien politique efficace et pragmatique, une chaîne industrielle mature et complète, une main-d’œuvre locale compétente et talentueuse, ainsi qu’un environnement social stable et harmonieux. Investir et construire une usine en Malaisie constitue une étape importante de notre stratégie de mondialisation, en parfaite adéquation avec notre stratégie d’« ancrage en Asie et de connexion avec le monde ». Après notre implantation au Vietnam, ce projet ouvrira une nouvelle voie pour Leili, nous permettant de servir nos clients sur les marchés Asie-Pacifique et Amérique du Nord, et représente un pilier essentiel de notre développement international. »
Concernant l’industrie, Leili Malaysia s’appuiera sur ses lignes de production automatisées, ses entrepôts intelligents et sa technologie de fabrication de précision pour promouvoir la modernisation de la chaîne industrielle locale, en stimulant le développement coordonné des fournisseurs locaux en amont et en aval, et en contribuant à la création d’un pôle manufacturier plus compétitif en Malaisie.
Sur le plan social, l’usine Leili Malaysia créera directement plus de 200 emplois, dont plus de 85 % seront réservés à la population locale. Elle établira progressivement des modèles de coopération entre l’industrie, le monde universitaire et la recherche, en collaboration avec les autorités locales et les universités, contribuant ainsi au développement des talents dans le secteur industriel et offrant aux employés une formation professionnelle et structurée ainsi qu’un environnement de travail favorable. Ces initiatives leur permettront d’évoluer vers des postes d’ouvriers qualifiés, d’experts techniques et de cadres.

Concernant l’environnement, la transformation et la modernisation des futures usines s’appuieront sur la production d’énergie photovoltaïque et des procédés à faibles émissions pour atteindre la neutralité carbone, illustrant ainsi le concept de développement durable par des actions concrètes et s’inscrivant dans le cadre du « Plan national de transition bas carbone 2050 » de la Malaisie. À l’occasion du 52e anniversaire des relations diplomatiques entre la Chine et la Malaisie, Raley, forte de ce nouveau départ et tournée vers un avenir prometteur, s’engage à faire de cette usine un nouveau tremplin, fidèle à ses aspirations initiales, pionnière et tournée vers l’avenir, et travaillant main dans la main avec ses partenaires malaisiens pour écrire ensemble un nouveau chapitre de « consultation conjointe, de construction conjointe et de bénéfices partagés » !

LEILI est ravi de participer à la 137e Foire de Canton, qui se tiendra du 15 au 19 avril au Complexe de la Foire de Canton, au 382, Yuejiang Zhong Road, à Guangzhou. Leader mondial des solutions de contrôle de mouvement et de motorisation, LEILI est impatient de rencontrer ses clients, partenaires et visiteurs du monde entier lors de cet événement commercial international de premier plan.
Cette édition de printemps de la Foire de Canton, reconnue comme le salon le plus important et le plus complet de Chine, offre aux professionnels du secteur une occasion unique d’explorer les dernières tendances, de nouer de nouvelles relations et de découvrir des produits de pointe. Chez LEILI, nous sommes fiers de participer une fois de plus à cette plateforme dynamique.
Visitez LEILI sur les stands 19.2E35-36 et 19.2F13-14
Nous vous invitons chaleureusement à nous rendre visite sur nos stands 19.2E35-36 et 19.2F13-14, où nous présenterons notre gamme complète de moteurs innovants et de systèmes d’entraînement intelligents. Des micromoteurs de précision aux solutions intégrées de contrôle de mouvement, les produits LEILI sont largement utilisés dans les appareils électroménagers intelligents, les équipements médicaux, l’automatisation industrielle et les systèmes automobiles.
Les visiteurs auront l’occasion de :
- Découvrir le lancement de nouveaux produits aux fonctionnalités de pointe et à l’efficacité accrue.
- Assistez à des démonstrations en direct de nos solutions de moteurs en action.
- Contactez notre équipe de professionnels pour discuter de solutions personnalisées adaptées à vos besoins.
- Découvrez les dernières avancées R&D de LEILI en matière de moteurs sans balais, de moteurs pas à pas, de servomoteurs et bien plus encore.
Forte de plus de deux décennies d’expertise et d’un engagement fort en matière d’innovation, LEILI continue d’être un pionnier en proposant des solutions de moteurs fiables, écoénergétiques et intelligentes à ses clients du monde entier.
À quoi s’attendre sur le stand LEILI
Notre stand mettra en avant les technologies clés et les atouts des produits LEILI. Vous y découvrirez :
- Moteurs BLDC hautes performances conçus pour un fonctionnement fluide et un couple élevé
- Moteurs pas à pas et motoréducteurs conçus pour un positionnement précis et un fonctionnement silencieux
- Systèmes de servocommande avancés offrant un contrôle supérieur pour l’automatisation industrielle
- Assemblages de moteurs sur mesure adaptés aux besoins spécifiques de nos clients
Nos équipes d’ingénierie et de vente seront sur place pour vous fournir une assistance technique approfondie et des conseils personnalisés. Que vous recherchiez un modèle standard ou une solution entièrement personnalisée, LEILI vous offre la flexibilité et l’expertise nécessaires pour accompagner votre projet unique.
Connectons-nous et innovons ensemble
La Foire de Canton est plus qu’une exposition : c’est un lieu de rencontre mondial pour les idées, les technologies et les partenariats. Chez LEILI, nous croyons au pouvoir de la collaboration pour créer des solutions de mouvement plus intelligentes et plus durables. Nous sommes impatients de partager notre vision et d’apprendre de vos réflexions.
À noter :
- 📅 Dates : 15-19 avril 2025
- 📍 Lieu : Complexe de la Foire de Canton, 382 Yuejiang Zhong Road, Guangzhou
- 🧭 Stand : 19.2E35-36, 19.2F13-14
Bienvenue sur notre stand ! Façonnons ensemble l’avenir du mouvement !


Les moteurs à flux axial sont sur le point de révolutionner l’industrie robotique, offrant une puissance, une efficacité et une compacité accrues par rapport aux moteurs à flux radial traditionnels. Leur conception unique en forme de disque assure une densité de puissance plus élevée, un meilleur refroidissement et des performances plus efficaces, ce qui les rend idéaux pour une vaste gamme d’applications robotiques, des robots industriels aux dispositifs médicaux.
Que sont les moteurs à flux axial ?
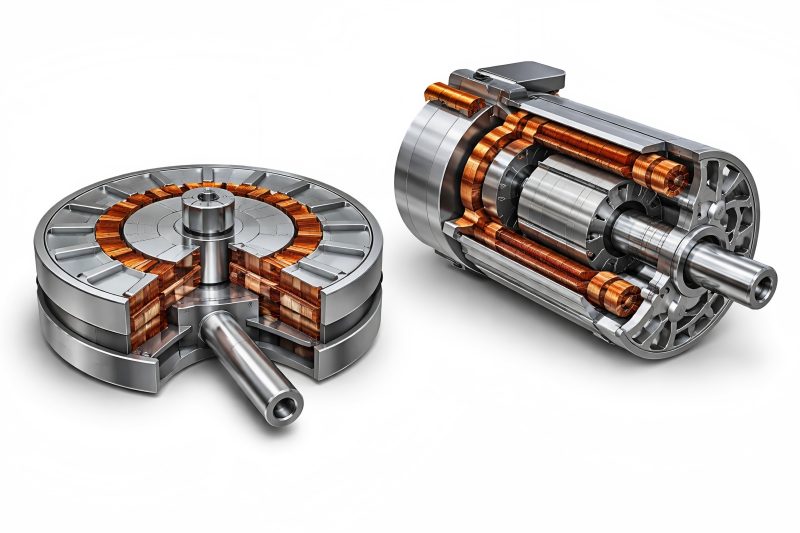
Moteurs à flux axial Les moteurs à flux axial, ou moteurs à disque, possèdent un flux magnétique qui circule le long de l’axe du moteur, contrairement aux moteurs à flux radial classiques où le flux circule radialement à partir du centre du rotor. La conception à flux axial se caractérise par sa géométrie en forme de disque, où le stator et le rotor sont généralement plats et superposés.
Caractéristiques principales des moteurs à flux axial :
- Compacts et légers : leur forme de disque réduit la longueur axiale, ce qui les rend plus compacts que les moteurs à flux radial pour une même puissance.
- Densité de puissance et de couple élevée : Ils génèrent un couple et une puissance supérieurs pour chaque unité de volume et de poids.
- Refroidissement amélioré : La conception offre une meilleure dissipation thermique grâce à une surface plus importante.
- Utilisation efficace des matériaux : Ils nécessitent généralement moins de matériaux que les moteurs à flux radial pour générer la même quantité d’énergie.
Ces caractéristiques uniques rendent les moteurs à flux axial particulièrement adaptés aux applications où l’espace, le poids et l’efficacité énergétique sont des facteurs essentiels.
Avantages des moteurs à flux axial en robotique
Densité de puissance améliorée
En robotique, une densité de puissance élevée est essentielle pour concevoir des systèmes compacts tout en conservant des performances élevées. Les moteurs à flux axial offrent un rapport puissance/poids supérieur aux moteurs à flux radial grâce à leur conception compacte et plate.
- Impact sur la robotique :
- Des robots plus légers : grâce à une densité de puissance plus élevée, les robots peuvent atteindre de meilleures performances sans être encombrants.
- Moteurs plus petits : cela permet une plus grande flexibilité de conception, ce qui permet aux robots d’être plus polyvalents dans divers environnements, notamment dans les espaces restreints.
| Paramètre | Moteur à flux radial | Moteur à flux axial |
| Densité de puissance | Modéré | Haut |
| Densité de couple | Modéré | Haut |
| Poids pour une même puissance de sortie | Plus haut | Inférieur |
| Taille pour une même puissance de sortie | Plus grand | Plus petit |
Amélioration de l’efficacité
L’efficacité est un facteur clé de la performance robotique, notamment pour les systèmes alimentés par batterie comme les robots autonomes. Les moteurs à flux axial sont généralement plus efficaces que les moteurs à flux radial grâce à leur circuit magnétique plus court, leurs pertes par effet Joule réduites et leur meilleur refroidissement.
Impact sur la robotique :
- Durée de fonctionnement prolongée : des moteurs plus efficaces augmentent l’autonomie des robots alimentés par batterie, ce qui les rend idéaux pour les systèmes autonomes.
- Consommation d’énergie réduite : cela réduit les coûts d’exploitation et prolonge la durée de vie du système.
Gestion thermique et dissipation de la chaleur
Les robots, notamment ceux fonctionnant à grande vitesse ou dans des environnements exigeants, génèrent beaucoup de chaleur. Les moteurs à flux axial offrent une gestion thermique supérieure grâce à leur surface plus importante, ce qui contribue à une meilleure dissipation de la chaleur.
Impact sur la robotique :
- Meilleures performances thermiques : le moteur peut fonctionner à des niveaux de puissance plus élevés sans surchauffer.
- Performances constantes : La dégradation des performances liée à la chaleur est minimisée, garantissant un fonctionnement plus fiable et constant dans le temps.

Applications des moteurs à flux axial en robotique
Robotique industrielle
Dans les robots industriels utilisés pour la fabrication, le soudage, l’assemblage et la manutention, les moteurs à flux axial offrent des avantages considérables. Leur compacité et leur couple élevé les rendent idéaux pour les bras robotisés et autres systèmes exigeant une grande précision et des performances optimales dans des espaces restreints.
| Application | Type de robot | Exigences motrices | Avantages des moteurs à flux axial |
| Bras robotisés | Robots articulés | Couple élevé, précision | Plus compact, plus léger, plus efficace |
| Véhicules à guidage automatique (AGV) | robots de transport | Haute efficacité, longue durée de fonctionnement | Rapport puissance/poids plus élevé, autonomie de la batterie prolongée |
| Machines CNC | machines de précision | Haute précision, couple | Consommation d’énergie efficace, conception compacte |
robotique médicale
Dans le domaine de la robotique médicale, où la précision et la compacité sont primordiales, les moteurs à flux axial sont de plus en plus utilisés dans les robots chirurgicaux, les exosquelettes et les dispositifs d’assistance. La capacité à fournir un couple élevé dans un format compact est cruciale pour ces applications, où l’espace est limité et la réduction du poids est essentielle.
Avantages :
- Poids réduit : cela réduit la contrainte exercée sur les patients utilisant des exosquelettes ou des robots d’assistance.
- Maniabilité accrue : des moteurs plus petits et plus puissants améliorent la flexibilité et la précision des robots chirurgicaux.
Robotique de service et grand public
Les moteurs à flux axial jouent également un rôle important dans le secteur en pleine expansion de la robotique de service et grand public, notamment pour les aspirateurs robots, les tondeuses à gazon et les assistants personnels. Leur capacité à offrir un rendement supérieur et une meilleure densité de puissance se traduit par une autonomie accrue et des systèmes plus performants et réactifs.
| Application | Type de robot | Exigences motrices | Avantages des moteurs à flux axial |
| Aspirateurs robots | Robots de nettoyage autonomes | Consommation d’énergie efficace, compacité | Autonomie de batterie prolongée, conception plus compacte |
| Assistants personnels | robots humanoïdes | Léger, haute puissance | Mobilité accrue, meilleure efficacité énergétique |
| Moteurs de drones | véhicules aériens sans pilote | Haute efficacité, faible poids | Plus de puissance pour des vols plus longs, poids réduit |
Robotique agricole
Les robots agricoles, tels que les tracteurs, moissonneuses-batteuses et semoirs autonomes, nécessitent des moteurs capables de résister aux conditions difficiles des environnements extérieurs tout en restant performants et fiables. Les moteurs à flux axial, grâce à leur densité de puissance et leur refroidissement améliorés, sont parfaitement adaptés à ces applications exigeantes.
Avantages :
- Puissance accrue pour les charges plus importantes : Idéal pour les machines qui doivent effectuer des tâches exigeantes comme le labour ou la récolte.
- Meilleure efficacité énergétique : pour les robots agricoles hybrides ou électriques, une meilleure efficacité du moteur se traduit par une consommation de carburant ou de batterie réduite.

Défis et considérations
Bien que les moteurs à flux axial offrent de nombreux avantages, leur adoption généralisée en robotique se heurte à des obstacles :
Complexité de la fabrication
La conception des moteurs à flux axial est plus complexe que celle des moteurs à flux radial. La forme du disque et l’alignement axial des composants exigent des techniques de fabrication précises et des matériaux plus performants.
Conception des roulements
Les moteurs à flux axial subissant des contraintes mécaniques différentes de celles des moteurs à flux radial, le système de roulement doit être soigneusement conçu pour supporter efficacement les forces axiales.
Coût
Les moteurs à flux axial sont généralement plus coûteux à produire en raison de leur complexité et de la nécessité d’utiliser des matériaux de haute qualité. Cependant, ce coût est justifié dans les applications robotiques de haute performance où les avantages dépassent les dépenses.
Adaptation de la chaîne d’approvisionnement
Les moteurs à flux axial étant moins répandus que les moteurs à flux radial, la chaîne d’approvisionnement de composants tels que les aimants, les stators et les rotors est encore en développement. Les entreprises pourraient devoir investir dans de nouveaux outillages et équipements pour une fabrication efficace de moteurs à flux axial.
L’avenir des moteurs à flux axial en robotique
Malgré les défis, l’avenir des moteurs à flux axial en robotique s’annonce prometteur. Face à la demande croissante de robots plus petits et plus efficaces, et à la rationalisation du processus de fabrication des moteurs à flux axial, on peut s’attendre à une adoption plus large dans divers secteurs de la robotique.
Les innovations en matière de matériaux, de technologies de refroidissement et de techniques de fabrication continueront de réduire les coûts et d’améliorer les performances des moteurs à flux axial. Ces derniers deviendront ainsi encore plus attractifs pour les futures applications robotiques, notamment dans des domaines tels que la robotique portable, les drones et les robots collaboratifs (cobots).
Axial flux motors offer a transformative alternative to traditional radial flux machines in electric vehicles. Key advantages include:
- Higher torque and power density
- Superior efficiency and thermal performance
- Compact, flat form factor ideal for modern EV packaging
- Lower magnetic material requirements
- Better integration with advanced EV architectures
While challenges remain, automotive manufacturers and component suppliers are increasingly turning to axial flux designs to meet stringent performance, weight, and efficiency goals.
Motor Topologies: Axial Flux vs Radial Flux
What Is a Radial Flux Motor?
In a radial flux motor, magnetic flux flows radially — that is, from the center of the rotor outward or vice versa. Most conventional EV motors, like induction and PMSMs, are based on radial flux designs.
Key Features of Radial Flux Motors:
- Circular cylindrical geometry
- Flux path runs radially
- Wide industry adoption and manufacturing maturity
What Is an Axial Flux Motor?
An axial flux motor features magnetic flux that travels parallel to the motor’s axis (along the shaft direction). Its rotor and stator resemble stacked discs rather than cylinders.
Key Features of Axial Flux Motors:
- Disc-shaped geometry
- High torque density
- Short magnetic path length
Geometric and Magnetic Differences
| Feature | Radial Flux Motor | Axial Flux Motor |
| Flux Direction | Radial | Axial |
| Geometry | Cylindrical | Disc / Pancake |
| Magnetic Path Length | Longer | Shorter |
| EndStack Length | Longer | Shorter |
| Torque Density | Moderate | High |
| Packaging Flexibility | Limited | High |
| Cooling Surface Area | Smaller | Larger (disc surface) |
The geometry of AFMs gives them distinct electromagnetic and thermal characteristics compared with RFMs. These differences lead to multiple performance and efficiency outcomes that are particularly relevant for automotive applications.
Key Advantages of Axial Flux Motors in EVs
Higher Torque Density
In EVs, torque density (torque per unit volume or mass) is crucial. Higher torque density allows for smaller, lighter motors without sacrificing performance.
Axial flux motors are capable of generating much greater torque at low speeds due to:
- Larger effective air gap perimeter
- Better utilization of magnetic materials
- Increased rotor/stator interaction area
This results in more torque for the same size and weight compared to an equivalent radial flux motor.
Impact for EVs:
- Smaller motors reduce vehicle weight
- More compact packaging frees space for batteries or cargo
- Improved acceleration and driveability
Compact and Flat Form Factor
A unique advantage of axial flux motors is their “pancake” shape, which makes them exceptionally compact in axial length.
Benefits:
Allows different integration strategies such as:
- Hub motors in wheels
- Integration into drive axes or transmission housings
Enables lower center of gravity
Easier packaging in EV platforms, where space is at a premium
Typical Applications:
- In-wheel motors
- Integrated powertrain modules
- Aerospace and electric motorcycle applications
By contrast, radial flux motors are often bulkier for the same power rating.
Improved Efficiency Across Operating Range
Efficiency — the proportion of mechanical output to electrical input — plays a vital role in determining EV range and performance.
Why AFMs Are More Efficient:
- Reduced magnetic losses due to shorter flux path
- Better thermal management from greater surface area
- Lower copper losses at high current densities
Axial flux machines generally achieve higher peak and partial load efficiencies, which results in a greater proportion of the battery’s stored energy being converted into motion.
Extended Range: Higher efficiency leads to longer range per charge, enhancing consumer EV satisfaction.
Enhanced Thermal Management
Thermal performance affects motor longevity, power handling, and reliability.
Axial Flux Advantages:
- Disc geometry exposes more surface area for cooling
- Heat can be dissipated more uniformly
- Easy integration of liquid cooling at stator surfaces
Radial Flux Limitations:
- Heat must be conducted out through core iron, end windings, and frame
- Hot spots may appear within the winding pack
Better cooling allows axial flux motors to operate at higher continuous power levels without thermal derating.
Potential for Reduced Material Use
Permanent magnet materials (especially rare earth magnets) are expensive and subject to supply volatility.
Axial flux motors can reduce magnet usage due to:
- Efficient magnetic coupling
- Enhanced use of flux in the air gap
- Fewer magnets required for equivalent torque
This can lower cost and reduce dependency on critical raw materials — a growing concern in EV supply chains.
Performance and Packaging Comparison
Let’s compare three performance metrics across radial and axial flux motors commonly used in EVs.
| Metric | Radial Flux Motor | Axial Flux Motor | Notes |
| Torque Density | LowModerate | High | AFM often 20–50% higher torque density |
| Power Density | Moderate | High | Better flat packaging aids integration |
| Cooling Efficiency | Moderate | High | AFM disc design improves heat dissipation |
| Peak Efficiency | ~93–96% | ~95–98% | EV manufacturers target >95% |
| Magnet Usage | Higher | Lower | AFM efficiently uses flux from magnets |
| Packaging Flexibility | Limited | Excellent | Ideal for spaceconstrained EV designs |
Real-World EV Use Cases
In-Wheel Motors
Axial flux motors are especially suitable for inwheel applications. Their flat design allows direct integration into wheel hubs, offering:
- Independent wheel torque control
- Reduced drivetrain complexity
- Regenerative braking at each wheel
Implementing radial flux motors in wheels is challenging due to their bulkier shape, making AFMs a more natural fit.
Integrated Powertrain Systems
The compact axial design allows motors to be integrated in unconventional spaces:
- Between battery modules
- In the vehicle’s floor pan
- Within gearboxes as part of a single module
This integration reduces mechanical losses, simplifies assembly, and enhances packaging efficiency.
Technical Comparison: Electromagnetic Characteristics
Below is a simplified comparison highlighting magnetic and electrical differences.
| Feature | Radial Flux Motor | Axial Flux Motor |
| Air Gap Length | Longer | Shorter |
| Magnetic Flux Path | Through stator core radially | Across flat disc section |
| Inductance Profile | Moderate | Lower due to shorter path |
| BackEMF Shape | Sinusoidal | Often improved for certain designs |
| Cogging Torque | Moderate | Can be lower with proper design |
These electromagnetic characteristics flow through into real performance benefits such as smooth torque delivery and responsive acceleration.
Challenges and Considerations
While axial flux motors offer compelling advantages, they are not without challenges:
Manufacturing Complexity
Disk-shaped stators and rotors can be more complex to manufacture and assemble than standard cylindrical designs.
Precision alignment is critical
Multi-disc assemblies can complicate winding and assembly processes
Bearing and Mechanical Load Demands
The axial forces in AFMs impose different loads on bearings compared with radial flux machines, requiring robust mechanical design.
Supply Chain Adaptation
Because radial flux motor manufacturing is wellestablished, adopting axial flux designs requires:
- New tooling
- Supplier qualification
- Design optimization expertise
However, many OEMs are investing in these transitions due to longterm performance benefits.
Future of Axial Flux in EVs
Industry trends indicate growing interest in axial flux motor adoption, particularly for:
- High-performance EVs
- Electric commercial vehicles
- In-wheel motor systems
- Aviation-grade electric propulsion
Research and development continue to refine materials, cooling approaches, and scalable manufacturing methods.
L’électrification transforme des secteurs tels que les transports, la robotique, l’aérospatiale et l’énergie. Dans tous ces secteurs, une exigence demeure constante : améliorer les performances tout en réduisant le poids, le volume et la consommation d’énergie.
Contrairement aux moteurs radiaux traditionnels, les moteurs axiaux sont conçus pour fournir une densité de couple élevée dans un format plat et compact. Leur géométrie unique permet aux ingénieurs de repenser l’intégration du système, d’éliminer la complexité mécanique et de réduire la masse totale du système.
Comprendre l’électrification légère
L’électrification légère désigne l’intégration de systèmes d’alimentation électrique et de propulsion qui minimisent la masse tout en maintenant, voire en améliorant, les performances. La réduction du poids n’est pas qu’une question de structure : elle influe directement sur l’efficacité, la consommation d’énergie, le comportement thermique et la durée de vie du système.
Dans les véhicules électriques, des systèmes plus légers offrent une plus grande autonomie et une meilleure accélération. Dans l’aérospatiale et les drones, la réduction du poids permet d’emporter des charges utiles plus importantes et d’allonger la durée des vols. En robotique et en automatisation, des systèmes d’entraînement légers améliorent la réactivité, la sécurité et la précision.
Les moteurs jouent un rôle central dans cette équation. Comptant parmi les composants les plus lourds et les plus énergivores d’un système électrifié, leur choix influence considérablement les performances globales du système. Les moteurs axiaux répondent à de nombreux défis rencontrés par les architectures de moteurs traditionnelles dans les applications légères.

Principes de conception des moteurs axiaux
Les moteurs axiaux diffèrent fondamentalement des moteurs radiaux par l’orientation du flux magnétique et leur structure. Dans un moteur radial, le flux magnétique s’étend du rotor au stator. Dans un moteur axial, le flux magnétique est parallèle à l’arbre moteur, ce qui permet de générer un couple sur un grand rayon d’action.
Cette conception offre plusieurs avantages inhérents :
- Longueur axiale courte, ce qui donne une structure plate, en forme de crêpe
- Grand diamètre actif, augmentant le levier de couple
- Utilisation efficace des matériaux magnétiques, amélioration de la densité de puissance
- Configurations rotor-stator flexibles, y compris les conceptions à rotor unique/stator unique et à rotors multiples
Le couple étant proportionnel à la force multipliée par le rayon, le rayon effectif plus important des moteurs axiaux permet d’obtenir un couple plus élevé sans augmenter la masse du moteur. Cette caractéristique est particulièrement cruciale dans les applications où l’espace et le poids sont des contraintes importantes.
Pourquoi le poids est important dans les systèmes électrifiés
La réduction du poids des systèmes électrifiés engendre de multiples avantages en cascade :
efficacité énergétique
Une masse réduite diminue l’inertie, ce qui réduit l’énergie nécessaire à l’accélération et au freinage.
Performances thermiques
Les conceptions légères simplifient souvent les circuits de refroidissement, réduisant ainsi les goulots d’étranglement thermiques et améliorant la fiabilité.
Intégration de systèmes
Les moteurs compacts permettent une intégration plus étroite avec les boîtes de vitesses, les roues ou les composants entraînés, éliminant ainsi les accouplements et réduisant les pertes mécaniques.
Coût et durabilité
Une moindre utilisation de matériaux réduit les coûts des matières premières et l’impact environnemental, ce qui est particulièrement crucial pour l’électrification à grande échelle.
Les moteurs axiaux contribuent directement à tous ces domaines en permettant des performances élevées dans un format plus petit et plus léger.
Avantage en termes de densité de couple et de rapport poids/puissance
L’un des critères déterminants de l’électrification légère est la densité de couple, soit le couple produit par unité de masse ou de volume. Les moteurs axiaux surpassent systématiquement de nombreux moteurs radiaux à cet égard.
Moteur axial vs moteur radial – Comparaison des performances clés
| Paramètre | Moteur axial | Moteur radial |
| Densité de couple | Très élevé | Modéré |
| Longueur axiale | Court | Long |
| Rapport puissance/poids | Haut | Moyen |
| Efficacité de refroidissement | Élevée (exposition de surface) | Modéré |
| Flexibilité d’intégration | Excellent | Limité |
| Complexité mécanique | Faible | Moyen |
La géométrie plate des moteurs axiaux leur permet de générer un couple plus élevé à des vitesses de rotation plus faibles, éliminant souvent le besoin de réducteurs. La suppression des boîtes de vitesses réduit non seulement le poids, mais améliore également l’efficacité et la fiabilité du système.
Rôle des moteurs axiaux dans la mobilité électrique
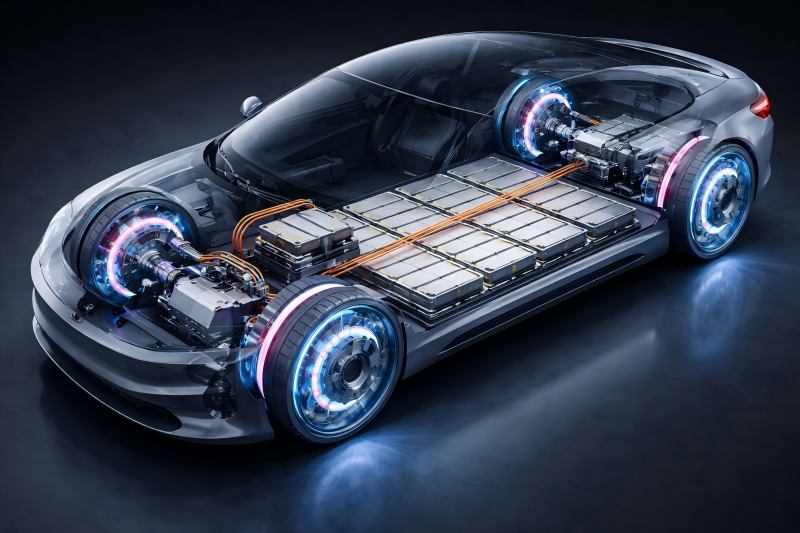
Véhicules électriques (VE)
Dans les véhicules électriques, le poids est directement lié à l’autonomie, à la taille de la batterie et au coût. Les moteurs axiaux permettent :
- Conceptions d’essieux électriques compacts
- Intégration du moteur dans la roue
- Masse de transmission réduite
- Rendement supérieur à charge partielle
En fournissant un couple élevé à bas régime, les moteurs axiaux réduisent le recours aux transmissions à plusieurs étages. Cette simplification permet d’alléger la chaîne cinématique et d’améliorer la flexibilité d’intégration dans le véhicule.
Micromobilité et deux-roues
Les scooters, vélos et petites motos électriques nécessitent des moteurs performants et compacts. Les moteurs axiaux sont parfaitement adaptés aux configurations à entraînement par moyeu ou à entraînement central, où les contraintes d’espace sont importantes.
Leur profil mince permet aux concepteurs d’intégrer les moteurs sans compromettre l’esthétique ni l’ergonomie, tandis que leur couple élevé assure une accélération fluide et une bonne capacité à gravir les côtes.
Électrification légère en robotique et automatisation
Les systèmes robotiques privilégient la précision, la réactivité et la sécurité. Même de faibles variations de poids ont un impact sur la dynamique des robots et plateformes collaboratifs.
Les moteurs axiaux contribuent à la robotique légère en :
- Réduction de la masse articulaire, amélioration de l’accélération et de la décélération
- Permettant les architectures à entraînement direct, éliminant le jeu.
- Amélioration du contrôle du couple et de la fluidité du mouvement
- Amélioration de l’efficacité énergétique en fonctionnement continu
Dans les robots humanoïdes, les robots mobiles autonomes et les exosquelettes, les moteurs axiaux contribuent à un équilibre optimal entre force et agilité. Leur format compact permet de placer les actionneurs au plus près des articulations, améliorant ainsi les performances cinématiques et réduisant les contraintes structurelles.
Aérospatiale, drones et mobilité avancée
La sensibilité au poids est particulièrement marquée dans les secteurs de l’aérospatiale et des systèmes aériens sans pilote. Dans ces applications, les moteurs axiaux jouent un rôle crucial en permettant l’électrification là où les moteurs traditionnels sont trop lourds ou trop peu performants.
Les principaux avantages sont les suivants :
- Rapports poussée/poids plus élevés
- Dissipation thermique améliorée dans les environnements à basse pression
- Intégration compacte dans les ailes, les hélices ou les systèmes de propulsion distribués
Les aéronefs eVTOL dépendent de plusieurs moteurs légers répartis sur la cellule. Les moteurs axiaux contribuent à cette architecture en combinant une densité de puissance élevée et une conception modulaire évolutive.
Avantages de la gestion thermique et du refroidissement
Les performances thermiques constituent un facteur limitant dans les systèmes à forte densité de puissance. Les moteurs axiaux offrent des avantages intrinsèques en matière de refroidissement grâce à leur géométrie :
- Grande surface exposée à l’air ambiant
- Courts trajets de conduction thermique des enroulements au boîtier
- Compatibilité avec les systèmes de refroidissement liquide ou à air
Une gestion thermique efficace permet aux moteurs axiaux de fonctionner à des niveaux de puissance continue plus élevés sans augmentation de masse. Cette capacité est essentielle pour l’électrification légère, où le surdimensionnement des moteurs pour des raisons de marge thermique est inacceptable.

Considérations relatives aux matériaux et à la fabrication
Les progrès réalisés dans le domaine des matériaux et des technologies de fabrication ont accéléré l’adoption des moteurs axiaux. L’électrification légère bénéficie des avantages suivants :
- Aimants permanents à haute densité énergétique
- Feuilles minces en acier électrique pour réduire les pertes dans le noyau
- boîtiers composites avancés
- méthodes de fabrication avancées comme la découpe laser et l’enroulement robotisé
Facteurs de conception favorisant les moteurs axiaux légers
| Facteur de conception | Contribution à l’électrification légère |
| Aimants de haute qualité | Couple accru sans masse ajoutée |
| Laminés minces | Réduction des pertes de fer et de la génération de chaleur |
| Architecture à entraînement direct | Élimine le poids de la boîte de vitesses |
| Conception modulaire rotor-stator | Une puissance évolutive sans refonte |
| Canaux de refroidissement intégrés | Maintient la densité de puissance |
Bien que la fabrication des moteurs axiaux puisse être plus complexe que celle des moteurs radiaux, les améliorations constantes en matière d’automatisation et d’outillage réduisent les obstacles liés aux coûts et améliorent la régularité de la production.
Impact des moteurs axiaux au niveau du système
La véritable valeur des moteurs axiaux dans l’électrification légère réside au niveau du système plutôt qu’au niveau des composants. Intégrés judicieusement, ils permettent :
- Des batteries plus petites grâce à une efficacité accrue
- Renforcement structurel réduit en raison de la masse plus faible
- Schémas mécaniques simplifiés
- Fiabilité accrue grâce à un nombre réduit de pièces mobiles
Ces avantages se cumulent sur l’ensemble du système, faisant des moteurs axiaux un choix stratégique plutôt qu’un simple remplacement de moteur.
Défis et limites
Malgré leurs avantages, les moteurs axiaux ne sont pas universellement idéaux. Parmi les défis à relever :
- Complexité de conception initiale plus élevée
- exigences de fabrication spécialisées
- Sensibilité aux tolérances d’entrefer
- Considérations relatives aux coûts pour la production en faible volume
Cependant, dans les applications où le poids et l’efficacité sont des facteurs critiques, ces inconvénients sont souvent compensés par les gains de performance.
Perspectives d’avenir : les moteurs axiaux et la prochaine phase d’électrification
À mesure que l’électrification s’étend à de nouveaux domaines — tels que l’aviation, les systèmes spatiaux, la robotique portable et l’automatisation industrielle avancée — la demande de moteurs légers et performants continuera de croître.
Les moteurs axiaux devraient jouer un rôle de plus en plus important en raison de :
- Améliorations continues des matériaux et du refroidissement
- Une plus grande standardisation et une meilleure évolutivité
- Intégration avec l’électronique de puissance et les systèmes de contrôle
- Alignement avec les objectifs de développement durable et d’efficacité énergétique
Dans de nombreuses plateformes électrifiées de nouvelle génération, les moteurs axiaux ne se contenteront pas de remplacer les moteurs radiaux ; ils permettront des architectures entièrement nouvelles qui étaient auparavant impraticables.
Conclusion
L’électrification légère n’est plus un objectif de conception optionnel ; c’est une exigence fondamentale dans toutes les disciplines de l’ingénierie moderne. Les moteurs axiaux répondent à cette exigence en offrant une densité de couple exceptionnelle, des dimensions compactes et des avantages en termes d’efficacité globale du système.
En réduisant le poids, en simplifiant les transmissions et en améliorant les performances thermiques, les moteurs axiaux permettent aux concepteurs de repousser les limites des systèmes électrifiés. Des véhicules électriques à la robotique, en passant par l’aérospatiale et la mobilité avancée, leur rôle dans les solutions d’électrification légères est à la fois révolutionnaire et durable.
Avec l’évolution constante des technologies, les moteurs axiaux sont appelés à devenir une pierre angulaire des systèmes électrifiés efficaces, performants et durables à l’échelle mondiale.
Moteurs synchrones à aimant permanent Les moteurs synchrones à aimants permanents (PMSM) sont largement utilisés dans divers secteurs industriels grâce à leurs performances remarquables. Reconnus pour leur rendement élevé, leur fiabilité et leur contrôle précis, ces moteurs sont devenus indispensables dans les applications exigeant une grande précision. Parmi les plus critiques figurent les machines à commande numérique (CNC) et les dispositifs médicaux. Cet article explore le rôle des PMSM dans ces domaines de haute précision, en examinant leurs avantages, leurs défis et leurs perspectives d’avenir.
Les bases des PMSM
La principale caractéristique des moteurs PMSM est leur capacité à maintenir la synchronisation avec le courant d’alimentation, ce qui leur confère un rendement et une réactivité exceptionnels. Les moteurs PMSM offrent des avantages par rapport aux autres moteurs, notamment :
- Haute efficacité : L’utilisation d’aimants permanents réduit les pertes d’énergie, ce qui rend les moteurs PMSM plus économes en énergie.
- Contrôle de précision : La synchronisation entre le stator et le rotor assure une grande précision dans le contrôle de la vitesse et de la position.
- Conception compacte : les moteurs PMSM présentent un rapport puissance/poids élevé, permettant ainsi des conceptions de moteurs compactes et légères.
- Faible maintenance : les moteurs PMSM nécessitent une maintenance minimale grâce à l’absence de balais ou de bagues collectrices qui s’usent.

Le rôle des moteurs PMSM dans les machines CNC
Les machines à commande numérique (CNC) sont essentielles dans les secteurs de la fabrication, de l’aérospatiale, de l’automobile et de la métallurgie, car elles nécessitent des mouvements précis pour des opérations de découpe, de fraisage et de perçage de haute précision. Les moteurs PMSM sont devenus le choix privilégié pour les applications CNC grâce à leur contrôle et leur précision supérieurs.
Précision et exactitude
Les machines à commande numérique (CNC) reposent fortement sur un contrôle précis des mouvements pour obtenir le produit final souhaité. Dans ces machines, les moteurs synchrones à aimants permanents (PMSM) assurent la rotation de haute précision requise de la broche et des axes, garantissant ainsi des pièces usinées avec une précision optimale. La densité de couple élevée et le fonctionnement régulier des PMSM assurent la précision de la commande numérique. La capacité du moteur à se synchroniser avec le contrôleur permet des ajustements en temps réel, autorisant un usinage ultra-précis des pièces.
Couple élevé à bas régime
L’un des principaux avantages des moteurs PMSM dans les machines CNC réside dans leur capacité à fournir un couple élevé à basse vitesse. Cette caractéristique est essentielle pour des applications telles que le fraisage, où le moteur doit générer un couple important pour usiner les matériaux tout en maintenant un mouvement lent et contrôlé. Les moteurs PMSM excellent dans ces situations, garantissant un fonctionnement fluide et sans vibrations de la machine CNC, condition indispensable au maintien de la précision dimensionnelle.
Contrôle et efficacité améliorés
Les machines à commande numérique (CNC) travaillent souvent avec des motifs complexes et des conceptions élaborées, exigeant un contrôle précis et dynamique du mouvement. Les moteurs synchrones à aimants permanents (PMSM), associés à des systèmes de commande avancés, offrent des performances dynamiques exceptionnelles. La boucle de rétroaction entre le moteur et le contrôleur permet une surveillance et un ajustement constants, garantissant ainsi l’optimisation de la position, de la vitesse et du couple du moteur tout au long du processus.
L’efficacité des moteurs PMSM réduit la consommation d’énergie, ce qui rend les machines CNC rentables pour les tâches de haute précision. La réduction de la production de chaleur et des pertes d’énergie contribue à prolonger la durée de vie des machines et à diminuer les coûts d’exploitation.
Tableau 1 : Avantages des moteurs PMSM dans les machines CNC
| Fonctionnalité | Avantage |
| Haute efficacité | Réduction de la consommation et des coûts énergétiques. |
| Contrôle de précision | Contrôle précis de la vitesse et de la position |
| Couple élevé à bas régime | Permet une coupe lente et contrôlée avec des vibrations minimales |
| Conception compacte | Conception de moteur compacte adaptée aux machines CNC compactes |
| entretien minimal | Usure réduite, temps d’arrêt moindre |
PMSM dans les dispositifs médicaux
Dans le domaine médical, la précision est primordiale. Qu’il s’agisse d’un outil de diagnostic, d’un robot chirurgical ou d’une pompe médicale, les performances des dispositifs médicaux dépendent de la capacité du moteur à assurer un mouvement précis et fiable. Les moteurs PMSM sont de plus en plus utilisés dans ces applications en raison de leur précision, de leur fiabilité et de leur capacité à fonctionner efficacement dans des environnements exigeants.
Robots chirurgicaux et robotique médicale
Les robots chirurgicaux représentent l’une des applications les plus avancées des moteurs à déplacement modulable (PMSM). Utilisés en chirurgie mini-invasive, ces robots requièrent des mouvements précis et fluides pour réaliser des interventions délicates. Les PMSM sont parfaitement adaptés à ces tâches grâce à leur capacité à assurer un contrôle fin des mouvements, essentiel pour des interventions telles que la découpe de tissus, la suture et même les transplantations d’organes assistées par robot.
L’utilisation de moteurs à aimants permanents (PMSM) dans les robots chirurgicaux permet d’atteindre une grande précision dans un espace restreint, ce qui est souvent indispensable lors d’interventions telles que l’endoscopie ou la chirurgie laparoscopique. De plus, les PMSM fournissent le couple nécessaire à la manipulation d’instruments chirurgicaux complexes, garantissant ainsi au robot des mouvements précis sans compromettre la sécurité du patient.
Équipement de diagnostic
Dans les applications de diagnostic telles que les appareils d’IRM, les scanners CT et les appareils d’échographie, les moteurs PMSM jouent un rôle crucial dans le maintien de la précision requise pour une imagerie de haute qualité. Par exemple, les appareils d’IRM s’appuient sur des champs magnétiques puissants et un contrôle précis du mouvement pour obtenir des images nettes et détaillées. Les moteurs PMSM sont utilisés pour contrôler la position des composants du scanner, garantissant ainsi le fonctionnement du système avec la précision et la fiabilité nécessaires.
De même, dans d’autres appareils de diagnostic, les PMSM sont utilisés pour alimenter les pompes, les moteurs et les actionneurs, garantissant ainsi que ces appareils fournissent des résultats précis et constants.
Pompes médicales
Les pompes médicales délivrent des médicaments, des fluides ou des nutriments avec précision ; les PMSM sont essentiels dans les pompes à perfusion, à insuline et de dialyse pour garantir leur précision et leur fiabilité.
Le mouvement précis et efficace assuré par les PMSM garantit un fonctionnement constant de ces pompes, délivrant la quantité adéquate de médicament ou de liquide au moment opportun.

Avantages des PMSM dans les dispositifs médicaux
| Fonctionnalité | Avantage |
| Haute précision | Indispensable pour réaliser des tâches délicates telles que la chirurgie |
| Faible niveau de bruit et de vibrations | Idéal pour les environnements médicaux sensibles |
| Compact et léger | Idéal pour l’intégration de petits dispositifs médicaux portables. |
| Fiabilité et durabilité | Garantit un fonctionnement continu dans les environnements de soins de santé vitaux. |
| efficacité énergétique | Faible consommation d’énergie, réduisant les coûts opérationnels dans le secteur de la santé. |
Défis et limitations des PMSM dans les applications de haute précision
Bien que les moteurs PMSM offrent de nombreux avantages, leur application dans des industries de haute précision comme les machines CNC et les dispositifs médicaux n’est pas sans défis.
Coût
L’un des principaux défis posés par les moteurs PMSM réside dans leur coût élevé. Les aimants permanents, notamment ceux fabriqués à partir de terres rares, peuvent être onéreux, ce qui rend les PMSM plus coûteux que d’autres types de moteurs, tels que les moteurs à induction. Ce coût peut constituer un frein pour les petites entreprises ou les jeunes pousses du secteur médical souhaitant mettre en œuvre des technologies de haute précision avec un budget limité.
Gestion de la chaleur
Bien que les moteurs PMSM soient généralement plus efficaces que les moteurs traditionnels, ils peuvent néanmoins générer de la chaleur, notamment lorsqu’ils fonctionnent à forte puissance ou dans des espaces confinés. Par conséquent, des systèmes de gestion thermique adaptés, comprenant ventilation et refroidissement, sont indispensables pour garantir le fonctionnement du moteur dans des limites de température sûres.
Complexité du contrôle
Les applications de haute précision exigent des systèmes de commande de moteurs avancés. Ces systèmes doivent être très sophistiqués et intégrer des boucles de rétroaction, des capteurs et des algorithmes pour gérer la vitesse, la position et le couple du moteur. La complexité du système de commande peut engendrer des coûts et des délais supplémentaires.
L’avenir des moteurs PMSM dans les applications de haute précision
L’avenir des moteurs PMSM dans les applications de haute précision s’annonce prometteur. Avec les progrès technologiques, le développement de moteurs PMSM plus abordables et plus performants devrait favoriser leur adoption dans un plus large éventail de secteurs industriels. Dans les machines à commande numérique (CNC), on peut s’attendre à voir apparaître des moteurs encore plus compacts et efficaces, contribuant ainsi à la miniaturisation des machines-outils et à l’amélioration des processus de fabrication.
Dans le domaine médical, les PMSM continueront de jouer un rôle essentiel dans l’évolution de la robotique chirurgicale et des outils de diagnostic, offrant une précision et une fiabilité accrues dans des procédures médicales de plus en plus complexes.
De plus, les recherches en cours sur l’utilisation de matériaux avancés pour les aimants permanents, ainsi que le développement de nouvelles technologies de refroidissement et de contrôle, contribueront à relever les défis actuels tels que le coût et la gestion thermique. À mesure que les moteurs PMSM deviendront plus abordables et plus efficaces, leur rôle dans les applications de haute précision devrait s’étendre, offrant ainsi des performances et une fiabilité accrues.
Conclusion
Les moteurs synchrones à aimants permanents (MSAP) se sont imposés comme une composante essentielle des applications de haute précision, des machines à commande numérique aux dispositifs médicaux. Leur rendement élevé, leur précision et leurs faibles besoins de maintenance en font un choix idéal pour les industries où la performance et la précision sont primordiales. Malgré les défis liés au coût, à la gestion thermique et à la complexité de la commande, l’avenir des MSAP dans les applications de haute précision s’annonce prometteur. Avec les progrès technologiques constants, les MSAP resteront à la pointe de l’innovation, moteurs d’innovation dans les secteurs de la fabrication, de la santé et bien d’autres.
L’intégration des moteurs PMSM dans ces applications a déjà permis d’améliorer considérablement leur efficacité, leur précision et leur fiabilité, ce qui en fait un outil indispensable des technologies modernes. Avec l’émergence de nouvelles avancées, les moteurs PMSM joueront sans aucun doute un rôle central dans la prochaine génération de systèmes de haute précision.
