
Les moteurs électriques sont essentiels pour alimenter diverses applications industrielles, commerciales et résidentielles. Parmi les types de moteurs électriques les plus courants figurent les moteurs à induction et les moteurs synchrones, chacun offrant des caractéristiques uniques adaptées à différents besoins opérationnels. Comprendre leurs différences permet de choisir le moteur le mieux adapté à une application donnée, garantissant performance, économie et efficacité.
Dans cet article, nous comparerons les moteurs à induction et les moteurs synchrones, en examinant leurs principes de fonctionnement, leur construction, leur rendement, leur régulation de vitesse et leurs applications. De plus, nous présenterons une analyse comparative avec des graphiques mettant en évidence les principales différences en termes de performance, de rendement et d’adéquation à différents usages.
Présentation des moteurs à induction et des moteurs synchrones
Moteur à induction
Un moteur à induction (MI) est un moteur asynchrone, ce qui signifie que son rotor ne tourne pas à une vitesse synchrone. En créant un champ magnétique tournant grâce au courant alternatif (CA) dans les enroulements du stator, le moteur à induction utilise l’induction électromagnétique pour créer du courant dans le rotor.
Le rotor suit ensuite ce champ, mais en raison du décalage entre le champ magnétique et le mouvement du rotor, celui-ci tourne toujours légèrement plus lentement que la vitesse synchrone du champ statorique.
Principales caractéristiques des moteurs à induction :
- Construction simple
- Faible coût
- Capacité de démarrage automatique
- Glissement entre le champ rotorique et le champ statorique
- Vitesse variable
Moteur Synchrone
La vitesse synchrone, c’est-à-dire la vitesse constante de fonctionnement d’un moteur synchrone, est déterminée par la fréquence du courant d’alimentation et le nombre de pôles du moteur. Dans un moteur synchrone, les champs magnétiques rotatifs du rotor et du stator se déplacent à la même vitesse. Ceci est obtenu en utilisant une alimentation CC ou un système d’excitation pour produire un champ magnétique constant dans le rotor, le synchronisant avec le champ du stator.
Principales caractéristiques des moteurs synchrones :
- Fonctionnement à vitesse constante
- Nécessite un système d’excitation externe pour le rotor
- Adapté au réglage du facteur de puissance
- Construction plus complexe que les moteurs à induction
- Rendement supérieur dans certaines applications
Principes de construction et de fonctionnement
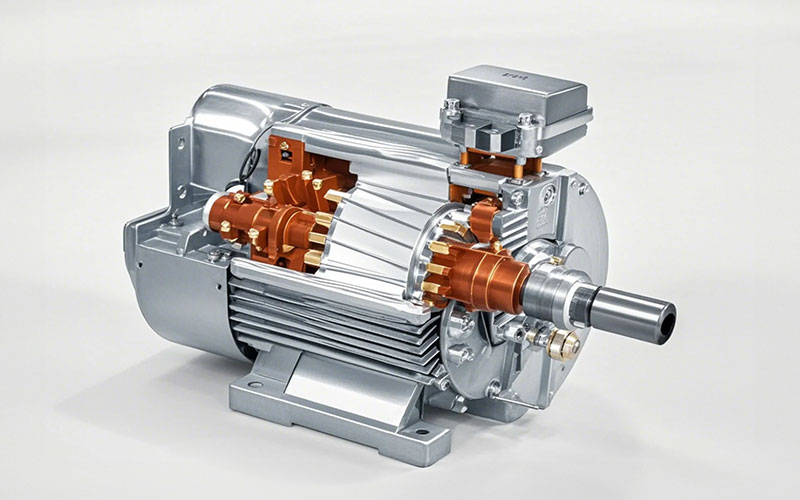
Construction de moteurs à induction
Les moteurs à induction se composent de deux parties principales :
- Stator : Les enroulements qui produisent le champ magnétique rotatif sont situés dans la partie fixe.
- Rotor : Le composant rotatif, souvent composé de barres de cuivre ou de fer laminé, se déplace en tandem avec le champ magnétique rotatif généré par le stator.
Principe de fonctionnement :
- Lorsqu’une tension alternative est appliquée, le stator génère un champ magnétique tournant, qui induit un courant dans le rotor.
- Le rotor tourne grâce aux interactions entre son champ magnétique et celui du stator.
- Le rotor est toujours en retard par rapport au champ tournant, ce qui entraîne un glissement, une caractéristique essentielle des moteurs à induction.
Construction d’un moteur synchrone
Les moteurs synchrones sont plus complexes que les moteurs à induction, car ils nécessitent un système d’excitation pour générer le champ magnétique du rotor.
- Stator : Le stator est doté d’enroulements qui créent un champ magnétique tournant, tout comme le moteur à induction.
- Rotor : Le rotor peut être à pôles saillants (pour les applications à basse vitesse) ou cylindrique (pour les applications à grande vitesse). Une source externe fournit un courant continu distinct qui excite le rotor.
Principe de fonctionnement :
- Un champ magnétique tournant est produit par le stator.
- Le rotor, excité par un courant continu, crée son champ magnétique.
- Le rotor est forcé à se synchroniser par le champ magnétique du stator.
- Le rotor et le stator tournent ensemble à la même vitesse (vitesse de synchronisation), sans glissement.
Efficacité et performance
Rendement des moteurs à induction
Les moteurs à induction sont généralement efficaces, mais peuvent subir des pertes dues au glissement entre le rotor et le champ statorique. Les variables suivantes influencent le rendement d’un moteur à induction :
- Glissement : écart entre la vitesse synchrone et la vitesse du rotor.
- Charge : le rendement diminue à mesure que la charge augmente, en particulier à faible charge.
- Facteur de puissance : les moteurs à induction ont un facteur de puissance en retard, en particulier à vide ou à faible charge.
Rendement des moteurs synchrones
Les moteurs synchrones sont généralement plus efficaces que les moteurs à induction, notamment lorsqu’ils fonctionnent à pleine charge ou presque. Leur rendement est supérieur car ils ne glissent pas, car :
- Les pertes d’énergie associées au rotor sont réduites.
- Il est possible d’ajuster le facteur de puissance, ce qui réduit les besoins en puissance réactive du système.
- Les applications exigeant un rendement élevé et une vitesse constante utilisent fréquemment des moteurs synchrones.
Tableau de comparaison des performances
| Paramètre | Moteur asynchrone | Moteur synchrone |
| Vitesse | Variable, avec glissement | Vitesse constante, sans glissement |
| Rendement | Modéré, diminue avec la charge | Élevé, surtout à pleine charge |
| Facteur de puissance | Inductif, nécessite compensation | Peut améliorer le facteur de puissance |
| Mécanisme de démarrage | Auto-démarrage | Nécessite une excitation externe |
| Complexité | Simple | Plus complexe avec composants supplémentaires |
| Coût | Plus bas | Plus élevé |
Contrôle de vitesse
Contrôle de la vitesse des moteurs à induction
Les moteurs à induction ont des vitesses variables, mais leur contrôle peut s’avérer complexe. Les méthodes courantes pour contrôler la vitesse des moteurs à induction sont les suivantes :
- Contrôle V/f : La méthode la plus courante consiste à ajuster simultanément la tension et la fréquence.
- Contrôle de la résistance du rotor : Diminution de la vitesse en augmentant la résistance du circuit du rotor.
- Changement de pôles : Pour modifier la vitesse du moteur, ajustez le nombre de pôles.
- Variateur de fréquence (VFD) : En modifiant la fréquence d’alimentation, les VFD sont fréquemment utilisés pour réguler la vitesse des moteurs à induction.
Contrôle de la vitesse des moteurs synchrones
Les moteurs synchrones fonctionnent à une vitesse définie en fonction de la fréquence du réseau. Le contrôle de la vitesse n’est pas aussi simple que pour les moteurs à induction. Cependant, la vitesse peut être ajustée dans des applications spécifiques grâce aux éléments suivants :
- Modification de la fréquence d’alimentation : pour modifier la vitesse synchrone.
- Contrôle de l’excitation : la modification du système d’excitation du rotor peut affecter la capacité de charge du moteur, mais n’a pas d’impact direct sur la vitesse.
Applications
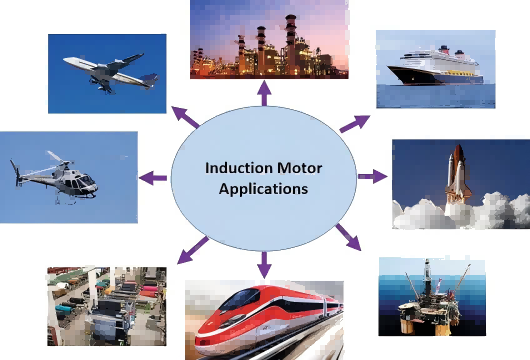
Applications des moteurs à induction
Grâce à leur polyvalence, les moteurs à induction sont fréquemment utilisés dans :
- Les pompes, les ventilateurs et les compresseurs sont des exemples d’entraînements industriels.
- Systèmes CVC : Pour la ventilation et la climatisation
- Appareils électroménagers : Lave-linge, réfrigérateurs
- Agriculture : Pompes d’irrigation, convoyeurs d’alimentation
- Transport : Véhicules électriques (dans certains cas)
Applications des moteurs synchrones
Les moteurs synchrones sont utilisés dans des applications spécialisées nécessitant une vitesse constante, un rendement et une correction du facteur de puissance :
- Production d’énergie à grande échelle : Les moteurs synchrones sont couramment utilisés dans les centrales électriques.
- Correction du facteur de puissance : Utilisée pour augmenter le facteur de puissance dans les secteurs à fortes charges inductives.
- Variateurs haute performance : Utilisés dans les industries nécessitant un contrôle précis de la vitesse, comme les papeteries, les industries textiles et les aciéries.
- Condensateurs synchrones : Pour améliorer la stabilité de la tension dans les réseaux électriques.
Comparaison des coûts
Les moteurs à induction sont généralement plus abordables grâce à leur construction plus simple et à leur mécanisme de démarrage automatique. Grâce à leur faible maintenance et à leur conception robuste, ils constituent une option abordable pour de nombreuses applications.
Les moteurs synchrones sont plus chers, principalement en raison de leur construction complexe, de leur système d’excitation externe et de leurs composants supplémentaires. Cependant, leur rendement accru et leur correction du facteur de puissance les rendent plus économiques pour les applications à grande échelle ou énergivores.
Avantages et inconvénients
Avantages du moteur à induction
- Construction simple et fonctionnement fiable.
- Rentable pour une large gamme d’applications.
- Auto-démarrage.
- Entretien réduit grâce à l’absence de balais.
Inconvénients des moteurs à induction
- Rendement inférieur à celui des moteurs synchrones, notamment à faible charge.
- Vitesse variable, nécessitant un équipement supplémentaire pour un contrôle précis de la vitesse.
- Des dispositifs de correction du facteur de puissance peuvent être nécessaires pour les facteurs de puissance retardés.
Avantages des moteurs synchrones
- Son fonctionnement à vitesse constante le rend idéal pour les applications exigeant une grande précision.
- Rendement élevé, notamment en charge.
- La puissance réactive est réduite grâce à la correction du facteur de puissance.
- L’absence de glissement contribue à réduire les pertes d’énergie.
Inconvénients des moteurs synchrones
- La construction complexe nécessite davantage de composants et d’entretien.
- Nécessite une excitation externe du rotor.
- Plus coûteux au départ que les moteurs à induction.
- Ne démarre pas automatiquement, nécessitant des mécanismes externes pour le démarrage.
Conclusion
Les moteurs à induction offrent simplicité, fiabilité et coût réduit, ce qui les rend adaptés à un large éventail d’applications. En revanche, les moteurs synchrones offrent un rendement supérieur, une vitesse constante et une correction du facteur de puissance, ce qui les rend idéaux pour les applications hautes performances et énergivores.
Les ingénieurs et les entreprises peuvent choisir le type de moteur le mieux adapté à leurs besoins en tenant compte des variations de construction, de performances, de rendement et d’applications. En prenant en compte des facteurs tels que la charge, les exigences de régulation de vitesse, le facteur de puissance et le coût, il est possible de décider en toute connaissance de cause si un moteur à induction ou un moteur synchrone est le meilleur choix pour une tâche donnée.
