

Paramètres du produit
I. Qu’est-ce que le LiDAR
Le LIDAR est un système technologique combinant lasers, GPS et centrales inertielles pour acquérir des données et générer des modèles numériques d’élévation (MNE) d’une grande précision. Il permet de mesurer avec précision la position d’un faisceau lumineux frappant un objet cible et d’atteindre une précision de mesure de distance de l’ordre du centimètre. Son principal avantage réside dans sa précision et son efficacité opérationnelle, qui permettent de collecter rapidement un grand volume de données et de fournir des résultats de mesure précis et fiables pour diverses applications.
2. Perspectives de l’industrie LiDAR
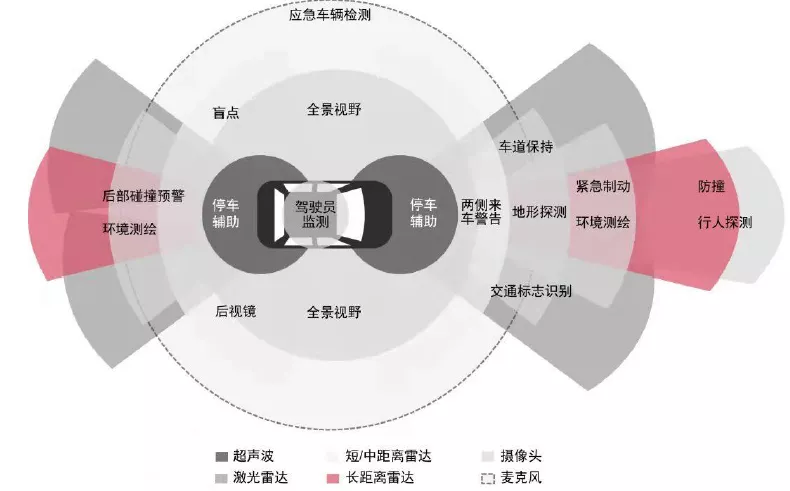
Le LiDAR, dispositif essentiel à la perception de la conduite autonome, présente l’avantage majeur d’un fonctionnement précis, rapide et efficace. Comparé à d’autres capteurs, tels que les caméras et les radars à ondes millimétriques, le LiDAR est devenu l’un des capteurs clés de la conduite autonome au-delà du niveau L3. Cette solution de fusion multicapteurs présente des barrières techniques plus faibles et une meilleure qualité d’image que la vision pure et s’impose comme la solution dominante pour la conduite autonome et la conduite assistée avancée. Les normes nationales LiDAR de qualité automobile s’améliorent progressivement, et l’innovation continue des technologies semi-solides et solides renforce encore le potentiel de développement du LiDAR comme configuration essentielle pour la conduite autonome.
Dimensions mécaniques : mm
Source : PricewaterhouseCoopers, Anxin Securities Research Center
3. La classification du LiDAR
Type de rotation mécanique :
La rotation globale du réseau d’émetteurs-récepteurs est entraînée par le moteur afin de balayer le champ de vision horizontal à 360° de l’espace. La mesure de distance est constante dans ce champ.
LiDAR semi-solide :
Les solutions semi-solides sont caractérisées par le découplage de l’unité émettrice-réceptrice des composants de balayage, et l’unité émettrice-réceptrice (par exemple, laser, détecteur) n’est plus soumise à un mouvement mécanique, y compris notamment la solution de micro-oscillateur, la solution de miroir rotatif, etc. Applicable pour obtenir une partie du champ de détection de l’angle de vision (par exemple, vers l’avant), le volume est plus compact par rapport au radar rotatif mécanique.
Lidar à semi-conducteurs :
Les solutions à semi-conducteurs se caractérisent par l’absence de pièces mécaniques mobiles, notamment les solutions à réseau optique phasé (OPA), les solutions Flash, les solutions de balayage électronique, etc. Elles sont adaptées à la détection d’une partie du champ de vision (par exemple, vers l’avant) et sont plus compactes que les autres architectures, car elles ne contiennent aucun composant de balayage mécanique.
| Moyenne mécanique | Semi-solid | État solide (physique) | ||||
| Rotoscopique | Prismatique | MEMS | OPA | ÉCLAIR | ||
| Volumétrique | Grand | Relativement petit | Relativement petit | Petit | Minimal | Petit |
| Niveau de maturité | Haut | Haut | Haut | Milieu | Inférieur | Inférieur |
| Durée de vie | Court, 1000-3000 heures | Haut | Haut | 10 000 à 12 000+ heures | Haut | Haut |
| Portée de détection | Champ de vision à 360° | Champ de vision de 120° | Champ de vision de 120° | Plus petit, nécessite plusieurs épissures | Plus petit, scanne uniquement vers l’avant | Plus petit, scanne uniquement vers l’avant |
| Précis | Plus haut, jusqu’à 128 lignes | Jusqu’à 300 lignes équivalentes (LuminarIris) | Équivalent à 144 lignes, mais le nuage de points n’est pas uniforme et présente des bords clairsemés | Plus haut, peut être assimilé à 160 lignes (un diamètre tech ML-30s) | Haut | Relativement faible |
4. Programme moteur LEILI LIDAR.
Actuellement, Leili propose deux principaux types de moteurs LIDAR : un miroir vibrant et un miroir rotatif. Ces moteurs peuvent être équipés de deux systèmes de codage optique et d’un système d’acquisition de codage, et sont adaptés à des applications allant de 300 à 10 000 tr/min. Grâce à sa coopération avec les principales licornes, Leili a réussi les tests d’environnement rigoureux de nombreux équipementiers et se classe au premier rang mondial en termes de livraisons pour les applications à grande vitesse.
En 2024, les moteurs de type miroir rotatif et miroir vibrant représenteront plus de 50 % de l’industrie LiDAR automobile, et en 2025, nous réaliserons la production de masse à grande échelle de plusieurs lignes de production flexibles et pourrons répondre à la demande de personnalisation multi-espèces et en petits lots, et continuerons à fournir à nos clients des produits et services à moindre coût et à fiabilité optique et mécanique plus élevée.
Leili Motor propose des solutions spécialisées et personnalisées pour aider ses clients à améliorer leurs produits. Pour plus d’informations, veuillez contacter [email protected].









-
Moteur à Courant Continu Sans Balais
Moteur à Courant Continu Sans Balais à Coupelle Creuse Série 16
Lire la suite -
Moteur à Courant Continu Sans Balais
Moteur à Courant Continu Sans Balais à Coupelle Creuse Série 22
Lire la suite -
Moteur à Courant Continu Sans Balais
Moteur à Courant Continu Sans Balais à Coupelle Creuse Série 28
Lire la suite












-
Moteur à Courant Continu à Aimant Permanent
Moteur pas à pas aimant permanent 15BY45-311G
Lire la suite -
Moteur à Courant Continu à Aimant Permanent
Moteur pas à pas à aimant permanent 22BY45
Lire la suite -
Moteur à Courant Continu à Aimant Permanent
Moteur pas à pas à aimant permanent 25BY412
Lire la suite -
Moteur à Courant Continu à Aimant Permanent
Moteur pas à pas à aimant permanent 10BY25T
Lire la suite -
Moteur à Courant Continu à Aimant Permanent
Moteur pas à pas à aimant permanent 08BY25T
Lire la suite -
Moteur à Courant Continu à Aimant Permanent
Moteur pas à pas à aimant permanent 065BY25T
Lire la suite






